Рассматривается задача линейного параметрического оценивания в одномерной модели движения материальной точки при наличии измерительных ошибок с неопределенным симметричным унимодальным распределением, но известными ковариациями и дисперсиями. Установлены гарантированные границы для вероятности превышения ошибкой оценивания заданного порога с учетом априорных ограничений на начальное положение и скорость. Проведено сравнение качества ридж-оценок для нескольких классов распределений помех.
1. ВВЕДЕНИЕ
Различные постановки задач параметрического оценивания остаются предметом изучения многих теоретических исследований [Simon, 2006]. Практическое применение оценок требует более осторожных выводов об их точности и надежности особенно в ситуации небольшого числа наблюдений и неопределенности распределения ошибок [Maryak, 2004]. Один из подходов к повышению робастности статистических решений состоит в определении наихудших границ их качества при допущении всевозможных распределений с ограниченными или фиксиро
ванными моментными характеристиками второго порядка [Delage, 2010]. Однако такой класс распределений приводит к достаточно пессимистическим выводам о вероятностных характеристиках точности робастных оценок. Более реалистичным выглядит использование дополнительной непараметрической информации о распределении, которое формулируется в виде естественного требования унимодальности [Dharmadhikari, 1988]. Если качество оценок описывается вероятностью выхода ошибки за определенные пределы [Панков, 2007], то гарантированные границы этого вероятностного
критерия качества можно получить на основе недавно разработанных обобщений неравенства Гаусса [6,7].
В настоящей работе рассматривается задача оценивания будущего положения объекта, который движется равномерно и прямолинейно, а его текущее положение наблюдается с учетом измерительных помех, имеющих неопределенное симметричное унимодальное распределение, но известную ковариационную матрицу. Описанная задача решается на основе гарантирующего подхода, который позволяет определить верхнюю границу вероятности превышения заданного порога ошибки с учетом априорных ограничений на начальное положение объекта и его скорость. Чтобы учесть априорную информацию о неизвестных параметров, вместо оценок метода наименьших квадратов (МНК) используются их регуляризованные версии — так называемые ридж-оценки [Демиденко, 1981]. Проводится сравнительный анализ нескольких вариантов ридж-оценок при наличии разного уровня информированности о распределении помех.
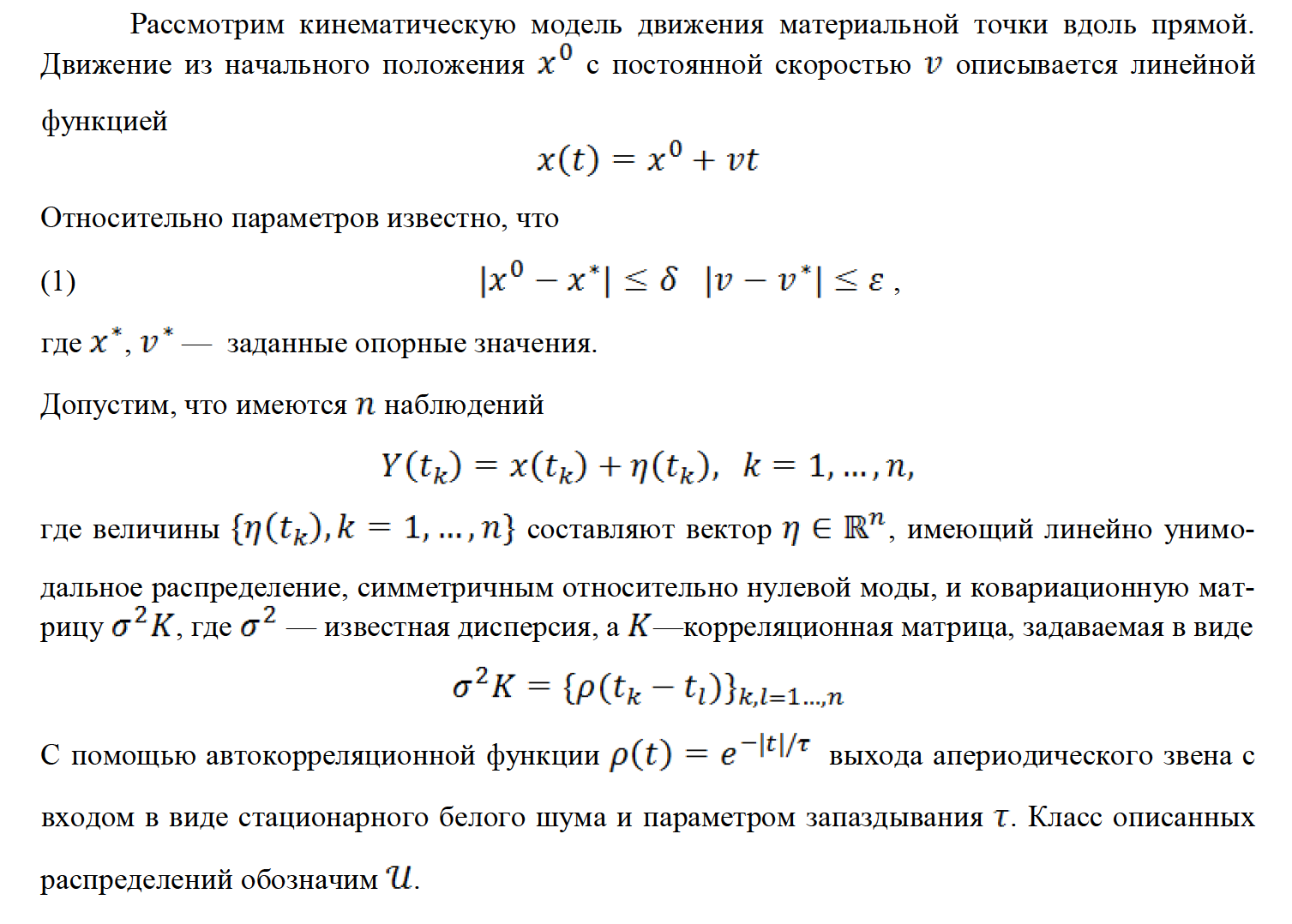
2. ОПИСАНИЕ МОДЕЛИ
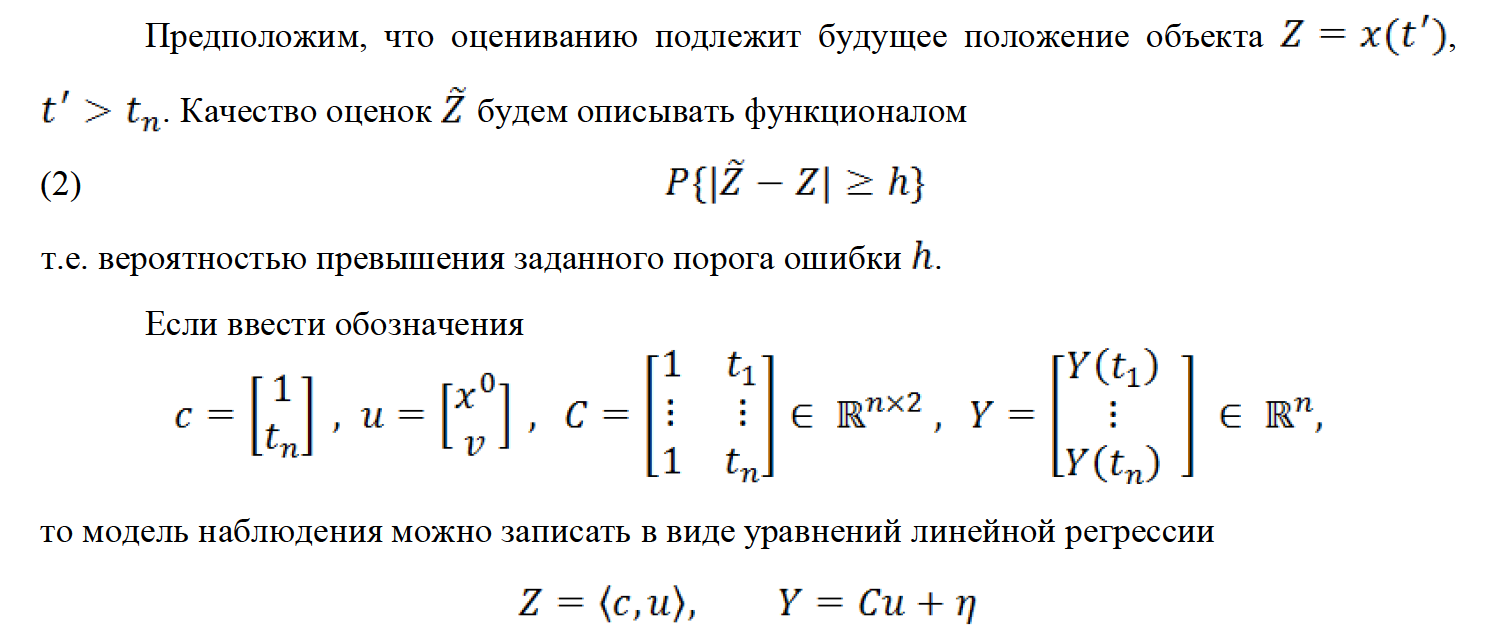
3. ПОСТАНОВКА ЗАДАЧИ
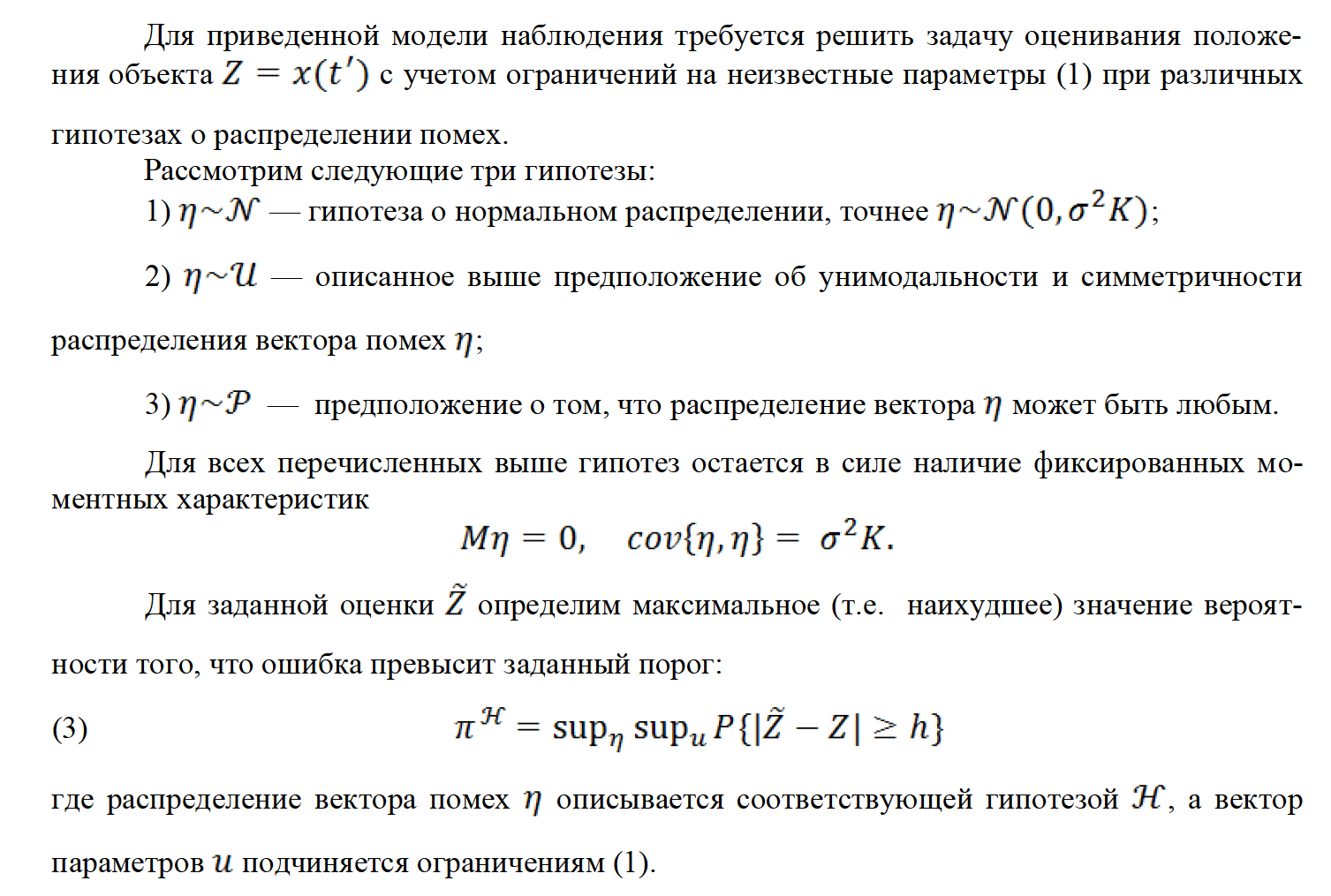
Задача гарантирующего оценивания по вероятностному критерию состоит в нахождении вероятностной границы (3) для заданной оценки. При сравнении нескольких оценок более предпочтительной стоит считать ту, которая дает наименьшее значение вероятностному критерию (2). Таким образом, качество оценок определяется их надежностью из расчета на наихудший случай
4. ОЦЕНКИ И ИХ ХАРАКТЕРИСТИК

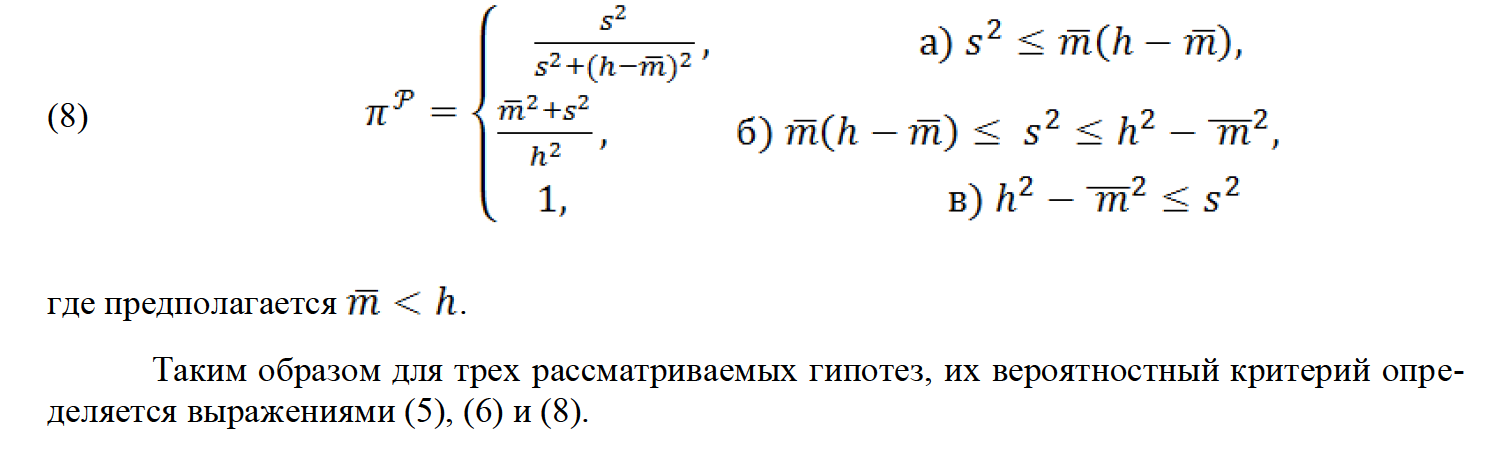
5. ВЕРОЯТНОСТНЫЙ КРИТЕРИЙ


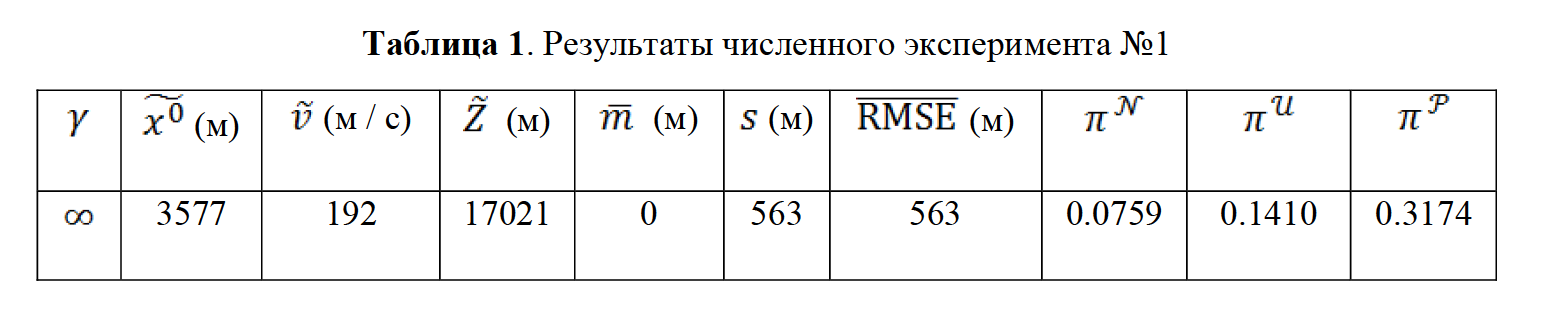
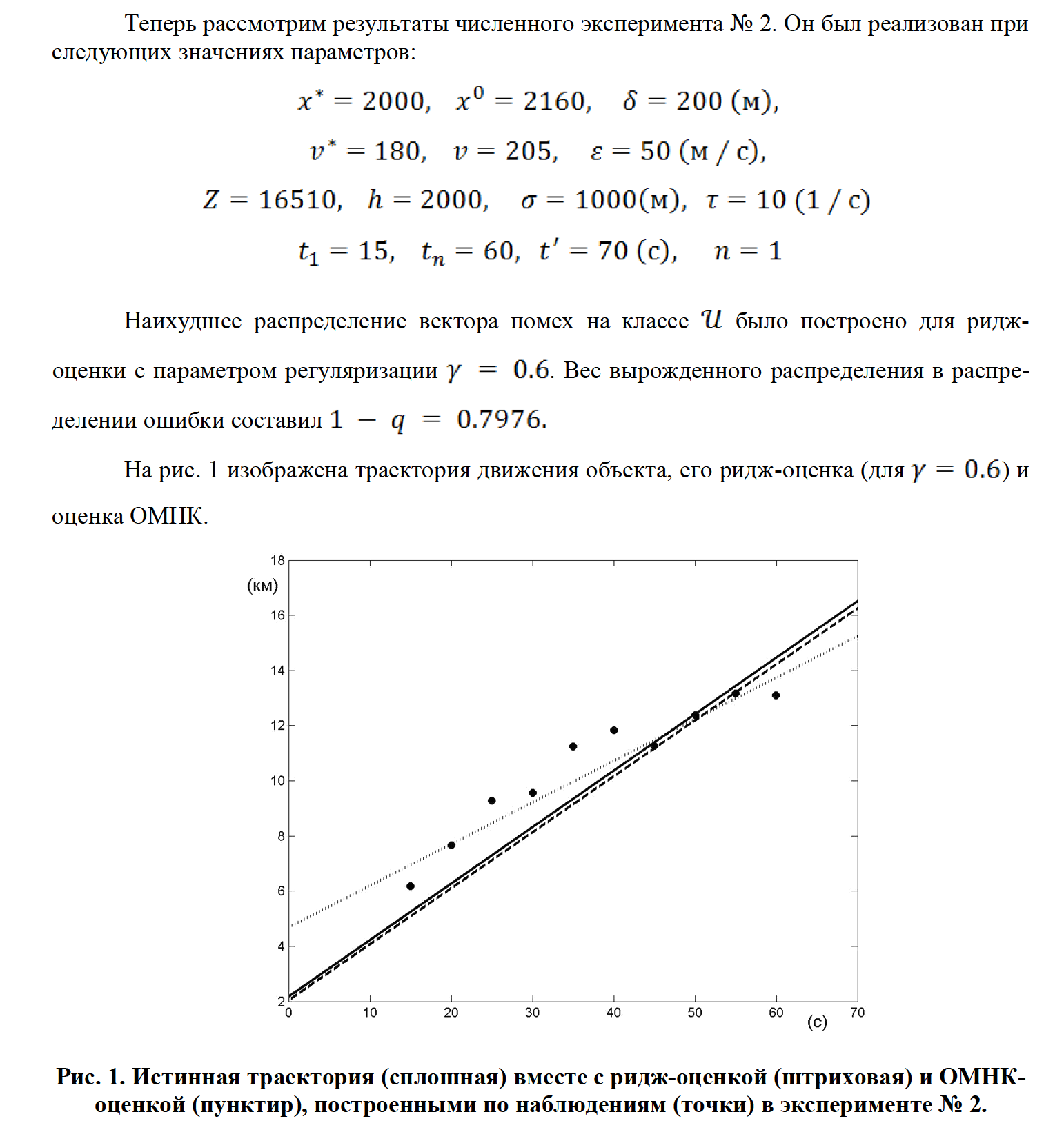
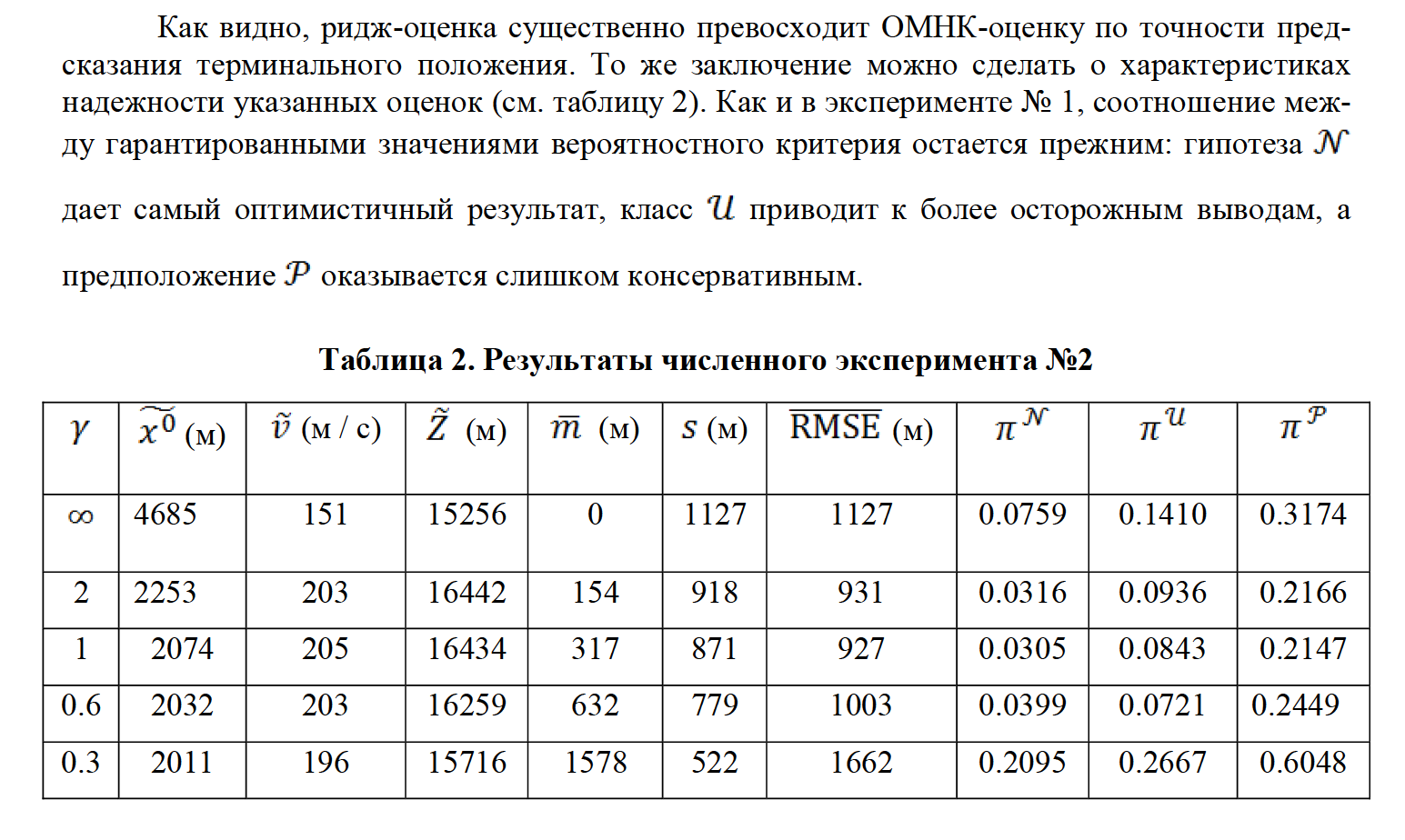
6. ЧИСЛЕННЫЙ ЭКСПЕРИМЕНТ

В заключение необходимо отметить, что коэффициенты ридж-оценки можно подобрать из условия минимума соответствующей вероятностной границы. Однако изучение данной задачи оптимизации выходит за рамки настоящей работы.