Введение
По данным специалистов Международной организации гражданской авиации (International Civil Aviation Organization - ICAO), более 80% всех авиационных происшествий в течение трёх последних десятилетий были вызваны ошибками экипажа. Больше всего людей погибло в ситуациях, связанных с попаданием воздушного судна (ВС) в сложные пространственные положения (СПП) и сваливания - эта группа авиационных происшествий составляет 40% от всех возможных вариантов. В связи с этим, интеллектуальная поддержка экипажа при выводе гражданского ВС из СПП и сваливания стала одной из наиболее актуальных тем в современном авиастроении.
Под СПП самолета понимается его нежелательное состояние, характеризуемое непреднамеренными отклонениями от параметров, которые обычно встречаются в эксплуатации. Под сваливанием - самопроизвольное апериодическое или колебательное движение самолета на больших углах атаки, которое не может быть прекращено никакими действиями лётчика без уменьшения угла атаки, а также неуправляемый режим полета, в котором характер движения самолета не адекватен отклонению органов управления и резко изменяется по сравнению с ожидаемым.
Учитывая, что в настоящее время исследуются возможности перехода к компоновке кабины с одним пилотом, а должностные обязанности второго пилота современного гражданского ВС, в частности, предусматривают:
- выполнение обязанностей командира воздушного судна (КВС) в полете в случае, когда КВС не способен их выполнять и не способен безопасно завершить полёт;
- владение техникой пилотирования и управления автоматическими системами ВС в такой степени, чтобы обеспечить безопасный исход полёта в случае потери КВС работоспособности;
- выполнение полёта как в качестве пилотирующего пилота с соблюдением нормативов техники пилотирования и управления ВС, так и непилотирующего пилота, отслеживая выполнение КВС полета согласно рабочему плану полета;
- выполнение, в случае угрозы, маневра по выводу ВС в безопасное положение;
- контроль непилотирующим членом экипажа всех действий пилотирующего члена экипажа по управлению самолетом, -
то технологии, применяемые в кабине с одним пилотом, должны обеспечивать автоматическое пилотирование при выполнении сложных режимов полёта, включая выход из СПП и сваливания, а также коррекцию управления, реализуемого пилотом средней или низкой квалификации, в реальном времени.
Важно отметить, что в руководствах по лётной эксплуатации гражданских самолётов прописано, что в случае возникновения опасности сваливания при больших углах атаки или другой ситуации, связанной с выходом из сложного пространственного положения, следует отключить автопилот и выводить ВС из опасного состояния вручную. Автопилот препятствует переходу в подобные состояния, но практика показывает, что пилоты в них по разным причинам всё-таки попадают. Детали управления в таких ситуациях в руководствах по лётной эксплуатации не прописаны. Таким образом, выход из опасных положений полностью находится в зоне ответственности пилотов, а его выполнение в автоматическом режиме требует разработки новых подходов к управлению ВС, а также математического и программного обеспечения, опирающегося на имеющие перспективу решения.
В настоящее время оценка уровня и контроль подготовки пилотов осуществляется инструкторами, имеющими большой практический опыт. Для формирования навыков предупреждения попадания и безопасного вывода из СПП и сваливания таких инструкторов недостаточно. Как показывает практика, большой опыт в этой области имеют летчики-испытатели, которые в силу своих профессиональных обязанностей достаточно часто летают на таких режимах. Однако их недостаточно для того, чтобы непосредственно обучить необходимое количество пилотов, требующихся современной авиации. Поэтому, учитывая известную ограниченную адекватность заложенных в тренажёры математических моделей, представляющих опасные ситуации (особенно в случае движения при больших углах атаки), представляется актуальным накопление и систематизация эмпирических данных, аккумулирующих опыт квалифицированного управления ВС опытными пилотами при выводе из критических режимов, и разработка, опираясь на эти материалы, программно-аппаратных средств, обеспечивающих безопасные манёвры в автоматическом режиме.
В рамках решения этой задачи, далее представлен новый подход к созданию математических и программных средств формирования управляющих команд для вывода из СПП в составе комплексного демонстратора технологий интеллектуального «виртуального второго пилота», опирающийся на методы обеспечения интеллектуальной поддержки и оценки уровня подготовки экипажа, представленные в работах [2,8,10-11]. Выход из сваливания рассматривается как последующий этап развития технологии, поскольку выполнение этого сложного лётного манёвра требует проведения дополнительных экспериментов и отработки технических решений на полученных данных
Формирование управляющих команд для вывода из СПП в составе комплексного демонстратора технологий интеллектуального «виртуального второго пилота»
Синтез управляющих команд, обеспечивающих вывод ВС из СПП, выполняется по образцу, представленному заданным релевантным паттерном поведения ВС, и обеспечивается программно-аппаратным комплексом (ПАК), входящим в настоящее время в состав комплексного демонстратора технологий интеллектуального «виртуального второго пилота» (рис. 1). Цель синтеза управляющих команд – обеспечение поведения ВС согласно заданным лётным нормативам, используя информацию о пилотировании квалифицированным экипажем. Используя накопленные в достаточном объёме эмпирические данные, синтез управляющих команд обеспечивает в реальном полёте компенсацию случайных внешних воздействий на ВС, так, чтобы обеспечить выполнение лётных маневров на уровне квалифицированного экипажа (в предположении, что внешние воздействия значимо не изменяют поведение ВС). Синтезированные управляющие команды могут быть использованы для обеспечения работы автопилотов нового поколения при выполнении сложных режимов полёта, включая выход из СПП, или для коррекции управления, реализуемого пилотом средней квалификации.
В рамках применяемой технологии, для выбора реализуемых вариантов управления ВС используется инструментальное средство «The Intelligent System for Flight Analysis» (ISFA) [4,7,9]. С помощью этого средства при выполнении лётного манёвра распознаётся его тип, после чего из специализированной БД извлекается паттерн, который обеспечивает корректный выход из создавшейся лётной ситуации и является наиболее близким к выполняемому манёвру в заданной метрике. Этот паттерн обеспечивает вычисление в реальном времени последовательности векторов параметров управления по желаемому изменению последовательности состояний ВС. При этом на параметры управления накладываются технические ограничения, обусловленные особенностями эксплуатации ВС.

Рисунок 1 - Комплексный демонстратор технологий интеллектуального «виртуального второго пилота»
Для вывода из СПП, ПАК формирования управляющих команд вычисляет в реальном времени последовательности управляющих воздействий как реакцию на реализуемое в полёте поведение ВС с заданным временным интервалом, обеспечивая заданное опытными пилотами движение ВС и выдавая необходимые для этого управляющие воздействия как элементы временных рядов.
Учитывая, что поведение ВС и управляющие воздействия на органы управления представляются многомерными временными рядами значений соответствующих параметров, для представления управляемого поведения ВС применяется каноническая многомерная нестационарная матричная модель движения и управления ВС с дискретным временем, идентифицируемая по эмпирическим данным [1,3,5-6]:
Математические методы, применяемые для идентификации многомерных нестационарных моделей движения и управления с дискретным временем, представляющих лётные манёвры и обеспечивающих формирование управляющих команд, передаваемых в систему управления самолётом, рассмотрены в работах [2,8,10]. Эта идентификация выполняется по эмпирическим данным, представляющим поведение ВС в различных лётных ситуациях, воспроизведённых в результате экспериментов на стенде или лётном тренажёре.
Компоненты процедуры формирования управляющих команд для вывода из СПП в составе комплексного демонстратора технологий интеллектуального «виртуального второго пилота» по образцу, представленному заданным паттерном поведения ВС, и его реализация с помощью инструментальных средств ISFA и ISFS («The Intelligent System for Flight Synthesis») представлены на рис. 2.
Разработанный ПАК позволяет использовать компоненты процедуры формирования управляющих команд в двух режимах:
-
в режиме «технического тестирования», когда автономная работа компонентов и их согласованность проверяются вне стенда;
-
в основном режиме, когда компоненты работают вместе со стендом.
С целью обеспечения согласованности во времени, очерёдность операций по обмену данными (а именно: считывания данных о наблюдаемом («возмущённом») фрагменте полёта - с одной стороны – и передачи паттерна заданного манёвра при управлении ВС опытным экипажем и «возмущённого» паттерна, включающего наблюдаемый фрагмент полёта в подходящем локусе – с другой стороны) регулируется семафором.
Инструментальное средство ISFA, используя результаты применения метода главных компонентов, многомерного шкалирования и кластерного анализа параметров полёта, формирует кластеры фрагментов полетов различных типов и качества исполнения, которые используются для их классификации в пространстве шкалирования. «Интеллект» этого средства содержится в паттернах эмпирических данных, включающих комбинированную информацию о динамике полёта и управлении воздушным судном, и может гибко изменяться по мере их накопления. Выполняемые ISFA оценки опираются на евклидову метрику в пространстве вейвлет-коэффициентов, обеспечивающие значимую дискриминацию результатов выполнения лётных упражнений. При достаточной скорости вычислений обеспечиваемые ISFA оценки могут быть получены в реальном времени.
При отсутствии управления, свободное движение ВС из начального состояния, заданного лётным манёвром, определяется матричными уравнениями
предварительно преобразовывая эти матричные уравнения в обычные системы линейных алгебраических уравнений:
На синтезированные параметры управления далее накладываются известные технические ограничения, обусловленные особенностями эксплуатации ВС.
Инструментальное средство ISFS обеспечивает:
-
идентификацию математической модели целевой деятельности экипажа, обеспечивающую вычисление по экспериментальным данным последовательностей матриц на интервалах квазистационарности, и синтез управляющих команд, которые обеспечивают переход от наблюдаемого «возмущённого» фрагмента полёта в состояния, предусмотренные заданным паттерном поведения ВС.
Заданный паттерн поведения ВС определяется инструментальным средством ISFA как наиболее близкий к наблюдаемому манёвру в заданной метрике из хранящихся в специализированной БД образцов полёта, обеспечивающих корректный выход из создавшейся лётной ситуации.
Учитывая, что переход от наблюдаемого «возмущённого» фрагмента полёта к заданному образцу пилотирования, выполненному квалифицированным экипажем, требует определённого времени, инструментальное средство ISFS вычисляет последовательность управляющих воздействий как реакцию на реализуемое в полёте «возмущение» для всего заданного лётного фрагмента в целом, последовательно выдавая с заданным временным шагом необходимые воздействия на органы управления. Как показывают вычислительные эксперименты, время вычисления управляющего воздействия в заданный момент времени примерно в 5-10 раз меньше временного шага, используемого при наблюдениях за состоянием ВС, что позволяет проводить вычисления на стенде или лётном тренажёре в реальном времени.
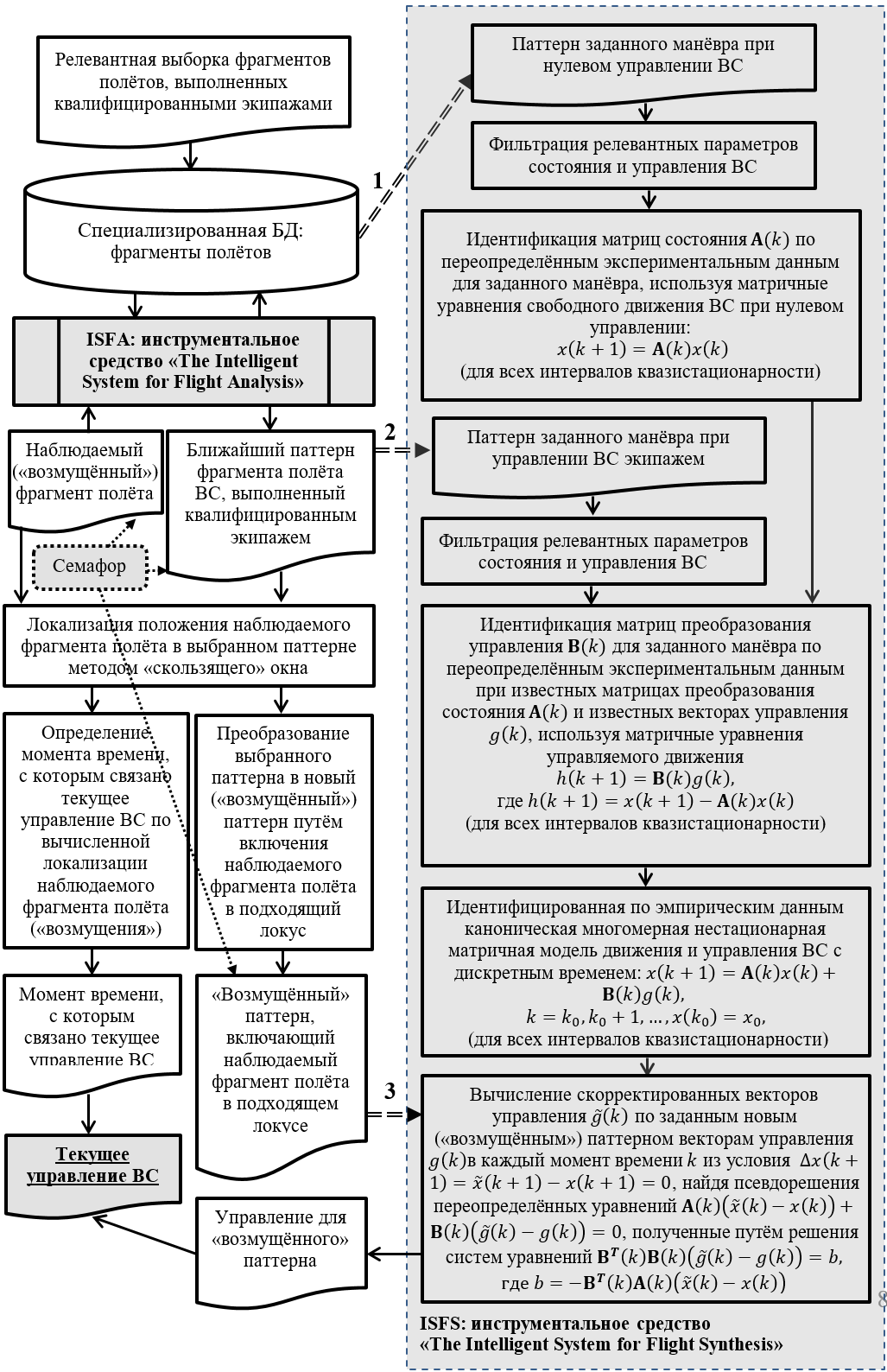
Рисунок 2 Детализированная схема синтеза управляющих команд по образцу, представленному заданным паттерном поведения ВС, и взаимодействия ISFA и ISFS (1 – паттерн заданного манёвра при нулевом управлении, 2 – паттерн заданного манёвра при управлении ВС опытным экипажем, 3 - «возмущённый» паттерн, включающий наблюдаемый фрагмент полёта в подходящем локусе)
Пример практического применения
На универсальном стенде прототипирования ГосНИИАС были проведены эксперименты по выходу из СПП, к которым привлекались лётчики, имевшие опыт полётов на критических режимах при отказах бортовых систем и силовой установки самолета, неблагоприятных внешних условиях, включая обледенение, сдвигах ветра, в условиях высоких и низких температур, сильном боковом ветре и т.д.
Условия на момент попадания в СПП приведены в таблице 1. Условием завершения экспериментальной ситуации (выхода из СПП) являлся прямолинейный горизонтальный полет со следующими условиями: крен ∈ [-10°…10°], тангаж ∈ [0°…5°], вертикальная скорость менее 600 ft/min, скорость: ∈[Vls, Vmo], – который соблюдался в течение 20 секунд.
Таблица 1 Условия на момент попадания в СПП
|
Обозначение СПП |
Начальные условия СПП |
|
СПП-1 |
крен=60°; тангаж=35°; V=230 kt |
|
СПП-2 |
крен=-135°; тангаж=-35°; V=230 kt |
|
СПП-3 |
крен= -55°; тангаж=-25°; V=270 kt |
|
СПП-4 |
крен= 120°; тангаж=-20°; V=270 kt |
В последующем описании результатов расчётов в качестве наблюдаемых параметров поведения ВС использовались:
-
(1)скорость рыскания,
-
(2)скорость по тангажу,
-
(3)скорость по крену,
-
(4)отклонение руля высоты,
-
(5)отклонение руля направления,
-
(6)отклонение левого элерона,
-
(7)отклонение правого элерона,
-
(8)угол атаки,
-
(9)угол крена,
-
(10)угол тангажа.
В качестве расчётных параметров управления ВС использовались:
-
(1)положение рычага управления канала тангажа,
-
(2)положение рычага управления канала крена,
-
(3)положение педалей,
-
(4)положение левого рычага управления двигателем (РУД),
-
(5)положение правого РУД.
Последние два параметра исключались из расчётов, если не изменялись в процессе выполнения лётного маневра.
Фрагменты полётов, представляющие различные реализации выхода из СПП, которые относятся к четырём указанным к Таблице 1 типам, представлены в виде точек в пространстве шкалирования на диаграмме рассеяния на рис. 3 вместе с фрагментами крейсерских полётов. Матрица взаимных евклидовых расстояний между этими фрагментами полётов в пространстве вейвлет-коэффициентов показана на рис. 4.
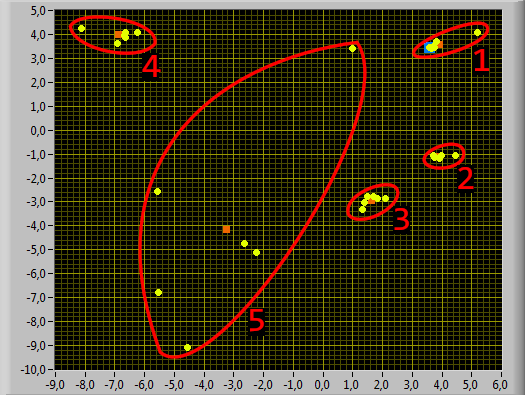
Рисунок 3 - Фрагменты полётов, представляющие различные реализации выхода из СПП (кластеры 1,2,3,4), и фрагменты крейсерских полётов (кластер 5) в виде точек в пространстве шкалирования
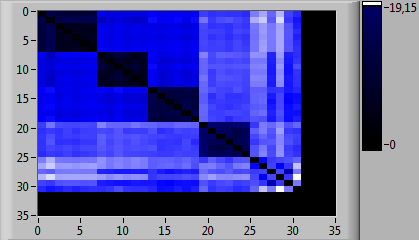
Рисунок 4 - Матрица взаимных евклидовых расстояний между фрагментами полётов в пространстве вейвлет-коэффициентов
На рис. 5 в качестве иллюстрации показаны полученные в режиме «технического тестирования»:
-
«возмущённый» фрагмент полёта (Flight Pars TRUE),
-
фрагмент выбранного посредством ISFA паттерна (Flight Pars with Control) и
-
синтезированный посредством ISFS «восстанавливающий» фрагмент полёта (Flight Pars SYNTHESIS) , -
продолжительностью 32 с для 10 указанных выше параметров поведения ВС.
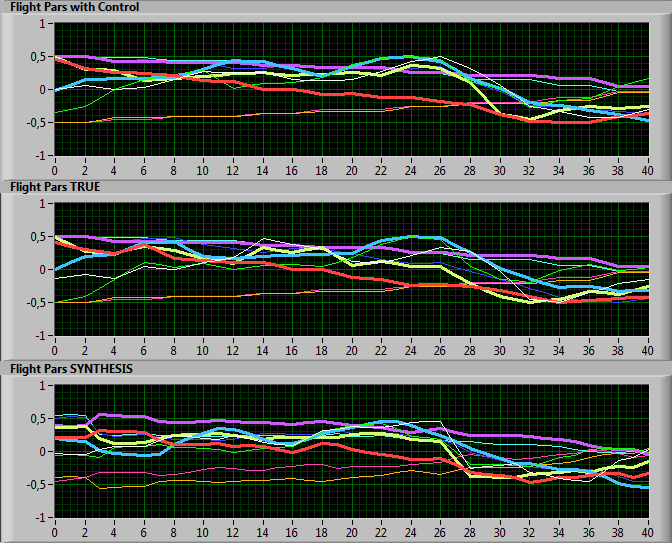
Рисунок 5 - «Возмущённый» фрагмент полёта (Flight Pars TRUE), фрагмент выбранного посредством ISFA паттерна (Flight Pars with Control) и синтезированный посредством ISFS фрагмент полёта (Flight Pars SYNTHESIS) продолжительностью 32 с (указанные фрагменты располагаются с 4-й по 35-ю секунду, 10 параметров поведения ВС)
На рис. 6 в качестве иллюстрации показаны:
-
фрагмент управления ВС в выбранном посредством ISFA паттерне (Control Pars TRUE) и
-
синтезированный посредством ISFS «восстанавливающий» фрагмент управления ВС (Control Pars SYNTHESIS) , -
продолжительностью 32 с.
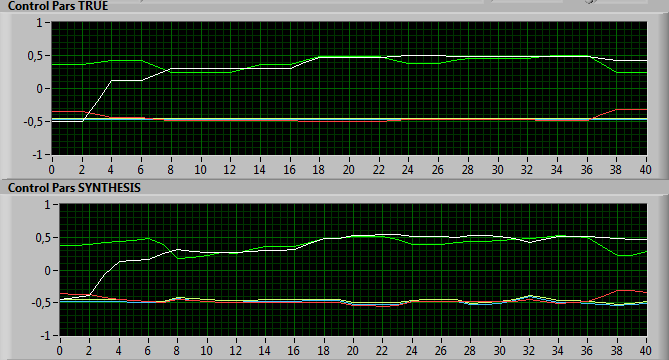
Рисунок 6 - Фрагмент управления ВС в выбранном посредством ISFA паттерне (Control Pars TRUE) и синтезированный посредством ISFS «восстанавливающий» фрагмент управления ВС (Control Pars SYNTHESIS) продолжительностью 32 с (указанные фрагменты располагаются с 4-й по 35-ю секунду, 4 параметра управления ВС).
Значения метрики согласования ( в случае параметров состояния; в случае параметров управления) свидетельствуют о приемлемом качестве синтеза управляющих команд.
Основные результаты и выводы
-
Разработано математическое и программно-аппаратное обеспечение синтеза управляющих команд, выводящих ВС из СПП, используя накопленные в достаточном объёме эмпирические данные.
-
При вычислении управляющих команд используется паттерн поведения ВС, релевантный возникшей лётной ситуации и содержащий информацию о пилотировании квалифицированным экипажем.
-
В предположении, что внешние воздействия значимо не изменяют поведение ВС, синтез управляющих команд позволяет компенсировать случайные внешние воздействия на ВС в реальном полёте, обеспечивая выполнение лётных маневров на уровне квалифицированного экипажа.
-
Учитывая, что переход от наблюдаемого «возмущённого» фрагмента полёта к заданному образцу пилотирования, выполненному квалифицированным экипажем, требует определённого времени, последовательность управляющих воздействий вычисляется как реакция на реализуемое в полёте «возмущение» для всего заданного лётного фрагмента в целом, с последовательной выдачей с заданным временным шагом необходимых воздействий на органы управления.
- Синтезированные управляющие команды могут быть использованы для обеспечения работы автопилотов нового поколения при выполнении сложных режимов полёта, включая выход из СПП, или для коррекции управления, реализуемого пилотом средней или низкой квалификации, в реальном времени.