ВВЕДЕНИЕ
Применение беспилотных летательных аппаратов (БПЛА) требует не только технического совершенствования автономных систем, но и углубленного изучения механизмов формирования командных навыков у операторов, взаимодействующих в условиях пространственной разобщенности и ограниченной информированности. Особенно актуальна эта задача для сценариев, где два пользователя управляют разными типами дронов: у одного из них целью является достижение конкретной точки в пилотируемом пространстве, у второго - разведка и координация действия первого. Такое разделение ролей создает уникальные вызовы для коммуникации: оператор первого дрона зависит от внешней информации, предоставляемой разведчиком, а их совместная эффективность напрямую связана с качеством передачи команд (например, через последовательность команд). Традиционные подходы в оценке командной работы, разработанные для пилотируемых систем, часто не учитывают специфику дистанционного взаимодействия, где коммуникация ограничена формализованными сигналами, а ошибки одного участника могут критически повлиять на решение поставленной задачи.
Для объективного анализа таких сценариев необходимы методы, формализующие динамику взаимодействия. Одним из перспективных подходов к решению является адаптация «схемы треугольника» (Михайловский, Ермаков, Юрьева, 2024; Куравский, Юрьев и др., 2024) позволяющей количественно оценивать командные навыки на основе анализа переходов между типами операций в процессе выполнения задачи.
СОВРЕМЕННЫЕ ПОДХОДЫ К ПОДГОТОВКЕ ОПЕРАТОРОВ БПЛА
Развитие беспилотной авиации расширило сферы применения дронов, что потребовало пересмотра подходов к подготовке специалистов. Современные операторы должны управлять сложными системами в условиях стресса, неопределенности и взаимодействия с другими участниками процессов. Традиционные методы подготовки, ориентированные на индивидуальные навыки, не обеспечивают достаточного уровня готовности к реальным вызовам, связанным с многозадачностью, динамичными сценариями и коллективным принятием решений.
Обучение операторов БПЛА исторически включает четыре этапа: теоретическую подготовку, симуляторы, практические полеты и квалификационные испытания. Однако эта модель имеет ограничения, так как не учитывает необходимость командной работы, быстрой смены ролей и адаптации к непредвиденным ситуациям. Стандартные тренажеры часто воспроизводят идеализированные условия, что снижает их эффективность при подготовке к сложным погодным условиям или техническим сбоям.
Одним из перспективных направлений стало внедрение технологий виртуальной и дополненной реальности, позволяющих создавать реалистичные сценарии обучения. Подобные среды повышают вовлеченность и развивают пространственное мышление (Будкин, Постников, Лагутина, 2023), однако их массовое применение ограничено стоимостью оборудования и недостаточной проработкой командных сценариев. Большинство решений пока фокусируются на индивидуальном обучении, тогда как реальные задачи требуют координации действий и общей ситуационной осведомленности.
Не менее важным является использование биофидбэк-технологий, которые отслеживают физиологические параметры обучающихся и адаптируют сложность заданий под их текущее состояние. Такой подход позволяет персонализировать нагрузку, выявлять моменты утомления и формировать навыки саморегуляции. Однако широкому внедрению препятствуют техническая сложность, необходимость специализированного оборудования и недостаток экспертов для анализа данных.
Технологии искусственного интеллекта открывают возможности для автоматизации анализа поведения обучающихся и построения индивидуальных траекторий обучения. Алгоритмы машинного обучения могут предсказывать ошибки, адаптировать сценарии под уровень подготовки и имитировать командное взаимодействие. Некоторые разработки демонстрируют повышение эффективности решений за счет моделирования ролевых паттернов. При этом проблема «непрозрачности» алгоритмов и зависимость от качества входных данных остаются барьерами для применения таких систем.
Элементы геймификации и игровые симуляторы повышают мотивацию, особенно среди молодых специалистов, и формируют базовые навыки управления. Однако упрощенная физическая модель и отсутствие реалистичных стрессовых факторов затрудняют перенос этих навыков на профессиональные задачи. Для преодоления данного разрыва необходима интеграция игровых элементов с аналитикой ошибок и модулями групповой координации.
Когнитивная подготовка вне полетной среды играет важную роль в повышении устойчивости к перегрузкам. Упражнения на развитие внимания, рабочей памяти и многозадачности снижают количество ошибок и улучшают скорость реакции. Такие тренировки не требуют дорогостоящего оборудования и могут быть использованы в программах среднего профессионального образования.
Интеграция различных методов в единую обучающую систему признается наиболее перспективным направлением. Комплексные тренажеры, сочетающие симуляторы, ИИ, биофидбэк и когнитивные тесты, позволяют формировать устойчивые навыки, соответствующие реальным условиям. Однако масштабирование таких решений требует значительных инвестиций и междисциплинарного сотрудничества.
Облачные тренажеры становятся важным инструментом снижения затрат на обучение за счет централизованной обработки данных. Платформы такого типа обеспечивают одновременную подготовку большого количества студентов и интеграцию аналитических модулей для оценки прогресса. Параллельно развивается стандартизация программ подготовки в сфере среднего профессионального образования, что необходимо для унификации компетенций и сертификации специалистов.
Подготовка операторов БПЛА представляет собой междисциплинарную задачу, требующую синтеза технических, когнитивных и командных аспектов. Эффективность современных технологий зависит от системного подхода, адаптации к локальным условиям и развития инфраструктуры образования. Интеграция инноваций в массовую практику, особенно на уровне среднего профессионального образования, станет критическим фактором для формирования кадрового потенциала отрасли.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СОГЛАСОВАННОЙ ДЕЯТЕЛЬНОСТИ ОПЕРАТОРОВ
Следуя работам (Kuravsky, 2021; Kuravsky, 2024; Kuravsky, 2022; Kuravsky, 2020), для количественного представления согласованной командной деятельности, реализуемой при работе на тренажере, применяется вероятностная модель, построенная на использовании матриц вероятностей переходов между элементарными действиями. Эта модель позволяет формализовать наблюдаемое поведение операторов, представляя его как процесс с конечным числом состояний и вероятностной динамикой переходов между ними.
Каждое элементарное действие определенного типа (например, нажатие определенной клавиши оператором-наводчиком или исполнителем) рассматривается как уникальное состояние системы. Система может находиться в одном из n возможных состояний марковского процесса с дискретными состояниями и дискретным временем (цепи Маркова), где n определяется количеством всех допустимых типов действий в рамках текущего экспериментального режима. Например, в парном взаимодействии двух операторов фиксируются до 14 типов воздействий (5 клавиши у каждого участника + 4 команды от наводчика), в то время как в интегрированном режиме используется 10 типов операций, объединяющих управление и навигацию.
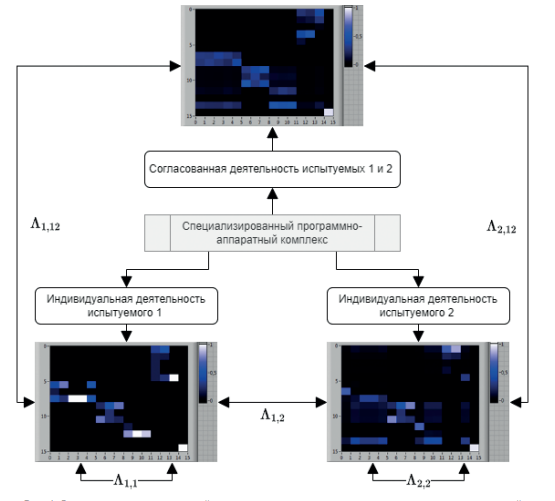
Fig. 1. Assessment of team activity skills according to the "triangle scheme", which involves a comparison of coordinated actions of subjects performed in pairs and individually
-
матрицу индивидуальной деятельности оператора 1;
-
матрицу индивидуальной деятельности оператора 2;
-
матрицу совместной (или интегрированной) деятельности.
Применение данной модели позволяет анализировать не только факт выполнения заданий, но и структуру взаимодействий между участниками, выявлять устойчивые поведенческие траектории, переходные вероятности между режимами управления, а также характер изменения стратегии при переходе от индивидуального к парному или интегрированному взаимодействию.
Построение и анализ матриц вероятностей переходов между типами элементарных действий обеспечивает формализацию диагностики командной деятельности, применимую как в исследовательских, так и в учебных целях.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ: ТРЕНАЖЕР, ИМИТИРУЮЩИЙ ВЗАИМОДЕЙСТВИЕ ОПЕРАТОРОВ БПЛА

Рис. 2. Визуализация управления дроном в трехмерном виртуальном пространстве со стороны оператора-наводчика
Fig. 2. Visualization of drone control in a three-dimensional virtual space by the operator-gunner

Риc. 3. Визуализация управления дроном в трехмерном виртуальном пространстве со стороны оператора-исполнителя
Fig. 3. Visualization of drone control in a three-dimensional virtual space by the performing operator
В стандартной конфигурации тренажер реализует взаимодействие двух операторов:
-
Оператор-наводчик управляет разведывательным дроном, оснащенным мини-картой и системой визуального целеуказания. Он передает навигационные команды второму оператору с помощью клавиш ←, →, ↑, ↓, задавая направления движения (вверх, влево, вниз, вправо). Наводчик обладает более широкой сенсорной осведомленностью, что позволяет ему выполнять роль координатора. Помимо этого, оператор-наводчик управляет своим дроном используя клавиши W, A, S, D, Space
-
Оператор-исполнитель управляет летательным аппаратом, выполняющим маневры на основе получаемых указаний. Управление осуществляется через клавиши W, A, S, D, Space. соответствующие направлениям перемещения. Ориентируется лишь по ограниченному визуальному полю, что делает его зависимым от точности и своевременности команд наводчика.
Каждое управляющее воздействие фиксируется системой регистрации и рассматривается как элементарная операция. Полученные данные агрегируются. На их основе формируются стохастические матрицы вероятностей переходов между состояниями (рис. 4-5). Эти матрицы представляют взаимодействие участников и позволяют формализовать совместную деятельность в виде марковского процесса.
В дополнение к парному режиму реализован режим интегрированного управления, при котором один участник совмещает функции обоих операторов. Управление в этом случае осуществляется посредством сдвоенности пяти команд, что обеспечивает размерность матрицы (10×10) (рис. 5).
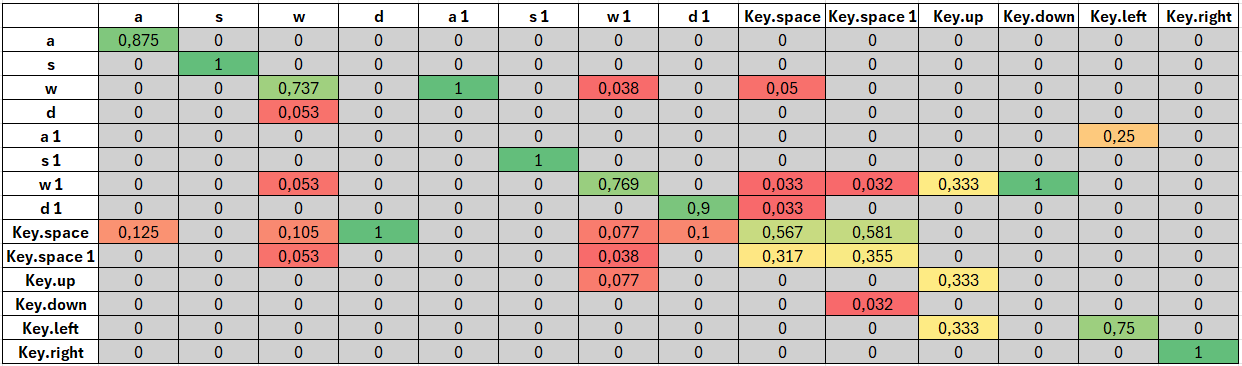
Рис. 4. Матрица вероятностей переходов 14x14
Fig. 4. Transition probability matrix 14x14
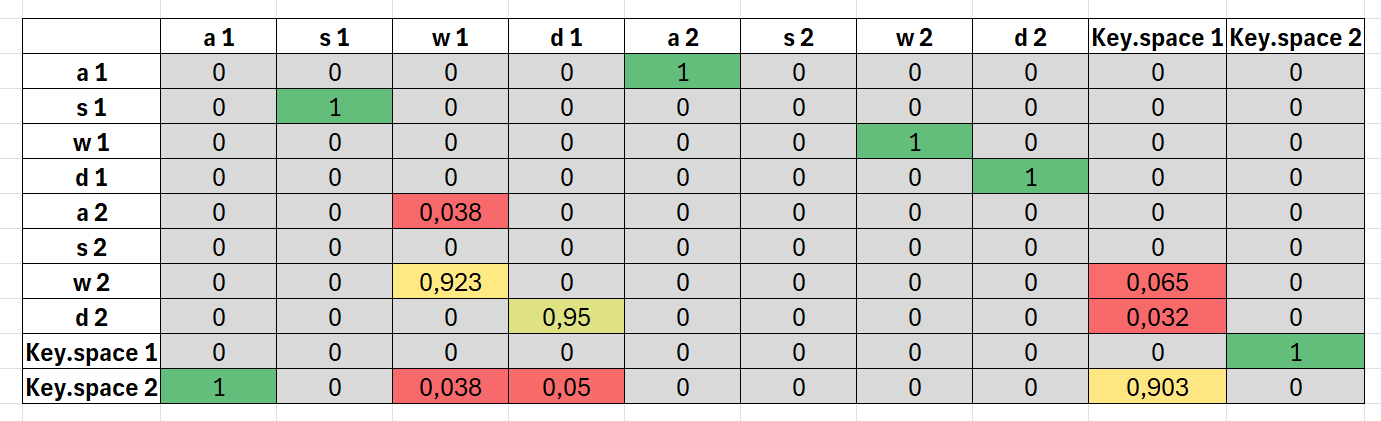
Рис. 5. Матрица вероятностей переходов 10x10
Fig.5. Transition probability matrix 10x10
Первая матрица размера 14×14 построена на основе анализа совместной деятельности двух операторов в условиях распределенного управления. Каждая из 14 строк и столбцов представляет отдельное действие, выполняемое одним из участников: W, A, S, D, Space, ←, →, ↑, ↓ — от оператора наведения, и клавиши W 1, A 1, S 1, D 1, Space 1 от оператора исполнения. Структура матрицы отражает возможность перехода от любого действия к любому другому, что соответствует гибким и адаптивным стратегиям взаимодействия в парной деятельности.
Вторая матрица размера 10×10 описывает поведение оператора в режиме интегрированного управления, при котором один участник одновременно выполняет функции навигации и исполнения команд. Каждая строка и столбец в данной матрице соответствует определенному элементарному действию (W, A, S, D, Space), а значения ее элементов представляют вероятности перехода от одного действия к другому.
После формирования стохастических матриц вероятностей переходов, описывающих паттерны поведения операторов, полученные результаты передаются в интеллектуальную систему квантового моделирования (Kuravsky, 2020), предназначенную для получения количественных оценок степени согласованности действий при совместном решении поставленной задачи средствами искусственного интеллекта в режиме реального времени. Эта система использует квантовые представления (Kuravsky, 2021; Kuravsky, 2024; Kuravsky, 2022) и реализована на языке G в среде графического программирования LabVIEW (рис. 6).
Применяя методы, представленные в работе (Куравский, Юрьев и др., 2024), для каждой сессии работы операторов выполняются:
-
сравнение с индивидуальной деятельностью — вычисляется степень отличия командной деятельности от деятельности в режиме индивидуального управления, что позволяет оценить уровень координации и наличие избыточного дублирования действий между операторами, используя «схему треугольника»;
-
сравнение с эталонной парой — реализуется путем сопоставления текущей матрицы переходов с эталонной моделью, сформированной по данным высококвалифицированных операторов.
.
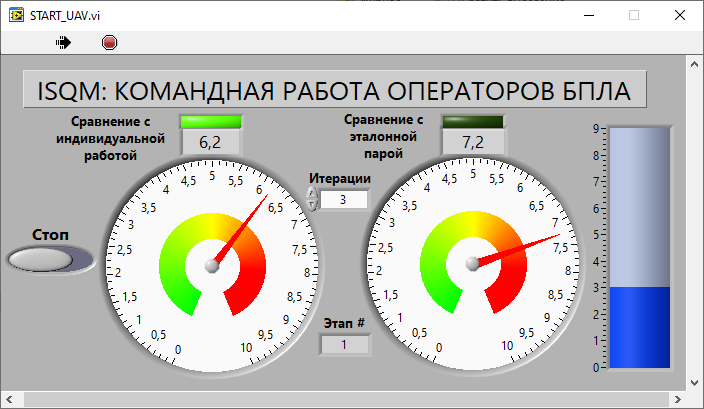
Рис.6. Визуализация оценок командной работы для операторов БПЛА
Fig.6. Visualization of teamwork assessments for UAV operators
Вычисленные оценки отображаются на аналоговых шкалах с цветовой дифференциацией (зеленая зона — высокая согласованность, красная — низкая). Пользователь в режиме реального времени получает информацию о качестве координации.
Функциональные возможности модуля визуализации оценок командной работы включают:
-
проведение интегральной количественной оценки согласованности действий в команде;
-
предоставление визуализированной обратной связи, понятной как исследователям, так и испытуемым;
-
адаптацию сценариев в режиме реального времени на основе текущих показателей согласованности;
-
сопоставление поведения с эталонными образцами и анализ отклонений, используя спектральную метрику (Kuravsky, 2021; Kuravsky, 2024; Kuravsky, 2022).
Этот модуль, встроенный в процесс тренировки, существенно повышает интерактивность и диагностическую ценность тренажера, обеспечивая объективную интерпретацию эффективности командной работы в режиме реального времени.
ЗАКЛЮЧЕНИЕ
Разработаны программные средства для количественной оценки командной работы операторов БПЛА, опирающиеся на представление их деятельности в виде марковских процессов. Предложенный подход позволяет формализовать динамику взаимодействия операторов, используя матрицы вероятностей переходов между элементарными операциями, что обеспечивает объективную диагностику и развитие навыков согласованного управления. Созданный тренажер, имитирующий распределенное управление дронами, демонстрирует эффективность интеграции математического моделирования с технологиями виртуальной реальности. Полученные результаты подтверждают эффективность применения марковских процессов и квантовых представлений для исследования командной деятельности. Разработанные средства открывают новые возможности для использования обучающих сценариев в реальном времени, что особенно актуально в условиях ограниченных ресурсов и необходимости стандартизации подготовки специалистов.