Введение
Автономные транспортные средства произвели радикальную трансформацию в транспортных концепциях, предвещая будущее, в котором вмешательство человека в процесс вождения будет сокращено. С этим огромным прогрессом возникают сложные задачи, требующие инновационных решений для обеспечения оптимальной производительности, максимальной безопасности и эффективного снижения энергопотребления в условиях постоянной динамики и изменений в таких критических условиях, как переполненные городские дороги и протяженные магистрали, обеспечение точного реагирования в режиме реального времени приобретает первостепенное значение, алгоритм AMAIA (Adaptive Machine Intelligence for Architecture - Адаптивный машинный интеллект для архитектуры) представляет собой новаторское решение, направленное на достижение тонкого баланса между этими конкурирующими требованиями путем интеграции двух взаимодополняющих технологических факторов: управления с помощью моделей прогнозирования (MPC) и машинного обучения. Алгоритм AMAIA представляет собой усовершенствованный подход к интеллектуальному управлению автономными транспортными средствами, превосходя традиционные методы благодаря неустанному стремлению оптимизировать общую производительность системы, эта амбициозная цель достигается за счет динамичного и непрерывного управления вычислительными и энергетическими ресурсами в условиях разнообразных эксплуатационных ограничений, которые включают, но не ограничиваются ими, сведение энергопотребления к минимально возможному уровню, обеспечивая сверхвысокую производительность.быстрое реагирование на изменения окружающей среды и условий вождения, а также поддержание стабильной и надежной вычислительной производительности (Pérez-Lombard, Ortiz, Pout, 2008).
В основе работы алгоритма AMAIA лежит использование Model Predictive Control (MPC), этой передовой технологии, основанной на построении точной математической модели поведения транспортного средства и окружающей его среды. Используя эту модель, алгоритм предсказывает будущие состояния системы на определенном временном горизонте, на основе этих прогнозов AMAIA оценивает широкий спектр возможных стратегий управления, выбирая оптимальную стратегию, которая обеспечивает наилучший баланс между различными целями, такими как точное отслеживание желаемого пути, поддержание безопасной скорости, а снижение энергопотребления, способность заглядывать в будущее и принимать упреждающие решения - это то, что отличает MPC и дает AMAIA значительное преимущество в работе с постоянно меняющимися динамическими ситуациями (Barak, Sadegh, 2016). В дополнение к возможностям прогнозирования, предоставляемым MPC, AMAIA интегрирует методы машинного обучения для повышения своей способности адаптироваться и непрерывно работать. кроме того, модели машинного обучения могут быть использованы для повышения точности модели MPC с течением времени путем анализа исторических данных о вождении и различных условиях окружающей среды., эти модели могут быть использованы для прогнозирования поведения других водителей и транспортного потока, что позволяет AMAIA принимать более обоснованные решения и эффективно избегать опасных ситуаций.
Кроме того, AMAIA использует сложные механизмы управления энергопотреблением, такие как технология динамического масштабирования напряжения и частоты (DVFS) (Demirbas, 2005). Эта технология позволяет алгоритму адаптировать частоту и быстродействие процессора системы в соответствии с текущими требованиями к управлению, когда вычислительные требования невелики (например, при двигаясь по прямой дороге с постоянной скоростью), AMAIA может снизить рабочую частоту и, таким образом, снизить энергопотребление, и наоборот, когда требуется большая вычислительная мощность (например, при движении в условиях интенсивного движения или выполнении сложных маневров)., алгоритм может увеличивать частоту для обеспечения оптимальной производительности, эта динамическая адаптация не только повышает энергоэффективность, но и способствует продлению срока службы батареи в электрических автономных транспортных средствах, Постоянное развитие систем автономного вождения требует глубокого понимания сложных взаимосвязей между различными переменными, влияющими на реакцию транспортного средства. истинная ценность интегрированного решения AMAIA, которое сочетает в себе точное прогнозирование будущего маршрута и интеллектуальную адаптацию к изменяющимся требованиям к энергопотреблению, а также немедленное и эффективное реагирование на сложные ситуации, которые могут возникнуть во время вождения, включая внезапные изменения желаемого направления движения автомобиля или неожиданные условия окружающей среды, такие как сильный дождь или внезапное появление препятствий на дороге.
Алгоритм AMAIA был подвергнут всесторонней экспериментальной оценке в различных реалистичных сценариях вождения, включая вождение в условиях большого скопления людей в городах и на скоростных автомагистралях. Результаты экспериментов убедительно продемонстрировали превосходство AMAIA над широко используемыми традиционными системами управления, такими как пропорционально-интегрально-производные (PID) контроллеры, Кроме того, AMAIA добилась значительного снижения на 36% средней абсолютной погрешности (MAE), которая является показателем точности отслеживания траектории, наиболее впечатляюще то, что алгоритм показал значительное снижение на 61% среднеквадратичной ошибки (RMSE), которая является мерой величины ошибок прогнозирования, AMAIA также добилась значительного снижения среднего общего энергопотребления во время вождения на 31% (Zhao, Magoulès, 2012). Значение алгоритма AMAIA заключается в его уникальной способности интегрировать передовые методы управления с интеллектуальными методами прогнозирования для обеспечения точного и эффективного реагирования в постоянно меняющихся динамических условиях вождения. идеальное решение для применения в автономных транспортных средствах, обеспечивающее высокую производительность и надежную работу в самых разных условиях вождения., AMAIA не только представляет собой значительный шаг вперед в развитии технологий автономного вождения, но и обеспечивает инновационную основу для проектирования и разработки маломощных и энергоэффективных интеллектуальных систем, основанных на передовых технологических принципах, открывая новые горизонты для более безопасного и устойчивого будущего в мире транспорта.
Методология
Методология повышения производительности встраиваемых систем в динамических средах основана на интеграции двух мощных и взаимодополняющих подходов: Model Predictive Control (MPC) и Lyapunov stability analysis. Все начинается с Model Predictive Control, который представляет собой ядро этой стратегии, обеспечивая проактивное видение для управления производительностью системы, а не полагаясь исключительно на немедленную обратную связь, MPC использует динамическую модель системы для прогнозирования ее будущих состояний (Demirbas, 2005), эта прогнозирующая способность позволяет системе принимать обоснованные управляющие решения, направленные на достижение оптимальной производительности как в краткосрочной, так и в долгосрочной перспективе (Zhao, Magoulès, 2012). В каждом рабочем цикле MPC решает сложную оптимизационную задачу, стремясь минимизировать благодаря этому механизму определяется функция затрат, которая учитывает как отклонения от идеальной производительности, так и использование управляющих входов, система становится способной эффективно адаптироваться к изменяющимся условиям и непрерывно корректировать управляющие входы на основе текущих измерений и изменений окружающей среды (Ekici, Aksoy, 2009), тем самым повышая производительность и снижая энергопотребление.
В то время как MPC фокусируется на достижении оптимальной производительности за счет прогнозирования и адаптации, роль анализа стабильности по Ляпунову заключается в обеспечении того, чтобы эта производительность не снижалась в долгосрочной перспективе за счет динамической стабильности системы (Yilmazkaya и др., 2018). Функция Ляпунова выступает в качестве математической меры для оценки стабильности системы, что указывает на его способность возвращаться в состояние равновесия после воздействия возмущений, обеспечивая строго отрицательное значение производной функции Ляпунова по времени, подтверждено, что система будет постепенно двигаться к желаемому стабильному состоянию и не будет отклоняться от него нежелательным образом, этот анализ дает гарантию того, что динамика системы будет оставаться под контролем даже в сложных условиях эксплуатации (Zhang, Yang, 2015).
Реальная мощь этой методологии заключается в бесшовной интеграции этих двух концепций, MPC обеспечивает возможность эффективной оптимизации производительности за счет упреждающего прогнозирования и планирования., в то время как анализ стабильности по Ляпунову гарантирует, что эти оптимизации не приведут к дестабилизации системы, такая интеграция обеспечивает тонкий баланс между эффективным динамическим откликом и долговременной стабильной и надежной работой, в результате чего получается встроенная система, которая не только способна достигать высокой производительности и адаптироваться к изменяющимся условиям, но и обладает надежностью этот комплексный подход, необходимый для эффективной работы в различных условиях эксплуатации, представляет собой значительную эволюцию в проектировании и эксплуатации сложных встраиваемых систем, это открывает путь к созданию более интеллектуальных, надежных и энергоэффективных приложений.
Математически основная цель модели прогнозирующего управления может быть выражена как минимизация функции затрат J на определенном временном горизонте N (Zhao, Magoulès, 2012). Эта функция учитывает прогнозы будущего состояния системы и управляющие входные данные с весами Q и R, которые определяют важность отслеживания желаемого состояния и сокращения усилий по управлению Соответственно, что касается анализа устойчивости по Ляпунову (Yilmazkaya и др., 2018), то он основан на нахождении функции V(x), которая всегда положительна для всех ненулевых состояний x и производная которой по времени \ точка {V}(x) всегда отрицательна для всех ненулевых состояний (Zhang, Yang, 2015), таким образом, обеспечивая постепенное приближение состояния системы к точке равновесия, эта интеграция между формулировкой задачи оптимизации в MPC и критериями устойчивости Ляпунова обеспечивает мощную математическую основу для проектирования высокопроизводительных и стабильных систем управления.
Встраиваемые системы требуют точного управления своими ограниченными ресурсами, и там, где оптимизация циклов процессора, памяти и энергопотребления имеет решающее значение для стабильной производительности, интеграция Model Predictive Control (MPC), стабильности по Ляпунову и методов энергосбережения становятся эффективным решением, поскольку MPC использует прогнозирование будущего состояния системы для принятия управляющих решений, обеспечивающих баланс производительности и энергопотребления, где функция затрат может учитывать энергоэффективность, в отличие от, Анализ стабильности по Ляпунову гарантирует, что эти улучшения не окажут негативного влияния на динамическую стабильность системы, даже при работе компонентов с более низкими напряжениями и частотами для экономии энергии динамическое масштабирование напряжения и частоты (DVFS) (Abdoli и др., 2018) является ключевым инструментом для оптимизации энергопотребления, регулируя частоту и напряжение процессора на основе рабочая нагрузка, интеграция DVFS с MPC позволяет принимать упреждающие решения по регулировке частоты и напряжения на основе прогнозов рабочей нагрузки, принимая во внимание ограничения стабильности, вытекающие из анализа Ляпунова, эта интеграция обеспечивает тонкий баланс между оптимальной производительностью, низким энергопотреблением и стабильностью работы встроенных систем, общее уравнение для энергопотребления P_P в зависимости от частоты f и напряжения V представлено в виде:
Динамическое масштабирование напряжения и частоты (DVFS) является жизненно важным механизмом снижения энергопотребления во встраиваемых системах, особенно в тех, которые работают от батарей, таких как мобильные устройства. За счет снижения частоты и напряжения в периоды низкой рабочей нагрузки достигается значительное снижение энергопотребления, что непосредственно способствует увеличению срока службы батареи (Abdoli и др., 2018). Однако, задача заключается в выборе оптимальных значений частоты и напряжения, которые обеспечивают тонкий баланс между поддержанием требуемого уровня производительности и минимизацией энергопотребления до минимально возможного уровня. В контексте многоядерных процессоров оптимизация производительности становится более сложной задачей. Алгоритмы балансировки нагрузки используются для эффективного распределения вычислительных задач по доступным ядрам, целью этих алгоритмов является достижение максимальной пропускной способности системы (обработка наибольшего объема работы в единицу времени) при минимизации общего энергопотребления (Abramovich, Babanova, 2018), это достигается за счет обеспечения того, чтобы все ядра работали на разумном уровне производительности. загруженность, позволяющая избежать простоя одних ядер в то время, как другие перегружены.
Эти концепции могут быть эффективно интегрированы с ранее рассмотренными методологиями Model Predictive Control (MPC) и анализа стабильности по Ляпунову. MPC может прогнозировать будущую нагрузку на систему и принимать динамические решения по регулировке рабочей частоты и напряжения (с использованием DVFS) и распределению задач между ядрами (с использованием алгоритмов балансировки нагрузки) в оптимальном режиме. аналогичным образом, функция затрат в MPC может учитывать не только показатели производительности и стабильности, но и ожидаемое энергопотребление, основанное на рабочих частотах, напряжениях и распределении нагрузки., Анализ стабильности по Ляпунову может быть использован для обеспечения того, чтобы динамические изменения этих параметров не приводили к нестабильности системы. Математически общее энергопотребление системы может быть выражено как функция вклада каждого ядра в энергопотребление за определенный период, что иллюстрирует взаимосвязь между распределением рабочей нагрузки и общим энергопотреблением:
В следующей таблице .1. представлены данные для встроенной системы, используемой в интеллектуальном транспортном средстве, которая применяет Model Predictive Control (MPC) для оптимизации производительности в управлении энергопотреблением, безопасности и настройках в реальном времени. Частота ЦП относится к рабочей частоте процессора системы, которая может варьироваться от 1,5 ГГц до 2,5 ГГц в зависимости от рабочей нагрузки (Abtahi и др., 2018). Наряду с частотой уровень напряжения колеблется от 3,3 В до 5 В, регулируясь в зависимости от требований к мощности процессора в любой момент времени. Потребление энергии во время нормальной работы обычно составляет от 5 Вт до 10 Вт, что указывает на энергию, используемую встроенной системой в различных условиях (Abu Sharkh, Shami, 2017). Управляющий вход включает в себя такие параметры, как скорость и направление, которые непрерывно регулируются алгоритмом MPC на основе обратной связи с датчиком в режиме реального времени. Эти управляющие входы гарантируют, что система эффективно реагирует на изменения в окружающей среде и на входы пользователя, обратная связь с датчиком имеет решающее значение для принятия решений в режиме реального времени, при этом датчики предоставляют данные со скоростью от 20 Гц до 50 Гц,срок службы батареи является важным фактором, и благодаря эффективному управлению энергией с помощью таких методов, как динамическое масштабирование напряжения и частоты (DVFS), система может работать примерно от 8 до 12 часов на одном заряде, в зависимости от рабочей нагрузки и оптимизации энергии, аспект распределения нагрузки (DVFS) управляет распределением мощности между компонентами системы, регулируя частоту, обычно в диапазоне от 1,5 ГГц при низких нагрузках до 2,5 ГГц при высоких нагрузках, проверка стабильности, обеспечиваемая методами на основе Ляпунова, подтверждает, что система сохраняет стабильность с течением времени, при этом скорость изменения функции Ляпунова всегда остается отрицательной, что гарантирует сближение системы с устойчивым равновесием. Система регулировки скорости непрерывно адаптирует скорость транспортного средства, оптимизируя потребление энергии и производительность на основе входных данных в режиме реального времени (Acharya, D’Mello, 2017). Благодаря комбинации методов MPC и функции Ляпунова система повышает энергоэффективность с приростом эффективности от 15% до 30%, обеспечивая оптимизацию как производительности, так и энергопотребления. Стабильность системы поддерживается даже в динамических и непредсказуемых условиях, что делает ее устойчивой к изменениям окружающей среды. Эта установка приводит к высокоэффективной, стабильной и адаптивной встроенной системе в интеллектуальных транспортных средствах.
Таблица 1: Основные эксплуатационные параметры встроенной системы MPC в интеллектуальных транспортных средствах
Table 1: Main operational parameters of the integrated MPC system in intelligent vehicles
|
Параметр |
Описание |
Диапазон значений |
|
Тактовая частота ЦПУ: |
Рабочая частота процессора системы |
1,0 - 2,5 ГГц |
|
Уровень напряжения |
Подаваемое напряжение приспосабливается к потребностям процессора в мощности |
3,3 – 5 В |
|
Расход энергии |
Мощность, потребляемая при стандартных операциях |
10 Вт |
|
Вход контроля раскачивания |
Переменные, такие как скорость и направление, регулируемые с помощью MPC |
В режиме реального времени (динамический) |
|
Частота отзывов |
Частота обновления данных датчика |
50 Гц |
|
Срок службы аккумуляторов |
Время работы на одну зарядку с использованием DVFS |
8-12 часов |
|
расщределение нагрузки |
Масштабирование частоты в зависимости от нагрузки |
1,5 ГГц (низкая частота) – 2,5 ГГц (высокая частота) |
|
Проверка устойчивости |
Валидация на основе Ляпунова, обеспечивающая конвергенцию системы |
Функция Ляпунова всегда < 0 |
|
Настройка скорости |
Адаптивная настройка скорости с использованием MPC в реальном времени |
Постоянное улучшение характеристик. |
|
Повышение энергоэффективности |
Повышение эффективности за счет интеграции ПДК и Ляпунова |
15-30% |
Результаты
Это углубленное сравнительное исследование было направлено на проведение всесторонней оценки эффективности двух передовых стратегий управления в контексте встроенных систем интеллектуального транспортного средства: Model Predictive Control (MPC) и алгоритма адаптивного машинного интеллекта для архитектуры (AMAIA). Была разработана усовершенствованная среда моделирования, позволяющая встроенной системе динамически изменяться. изменение структуры нагрузки с целью имитации реальных условий эксплуатации, с которыми сталкиваются интеллектуальные транспортные средства в различных и сложных сценариях вождения., основная цель этого исследования - от периодической езды по городу до движения по шоссе с регулируемой скоростью - заключалась в точной оценке способности каждого алгоритма достигать двух важнейших целей: во-первых, с высокой точностью прогнозировать текущее и будущее энергопотребление встроенной системы при таких динамично меняющихся нагрузках; и, во-вторых, поддерживать высокий уровень эффективности системы и быстро реагировать на изменения эксплуатационных требований, обеспечивая тем самым бесперебойную и надежную работу интеллектуального автомобиля в различных условиях.
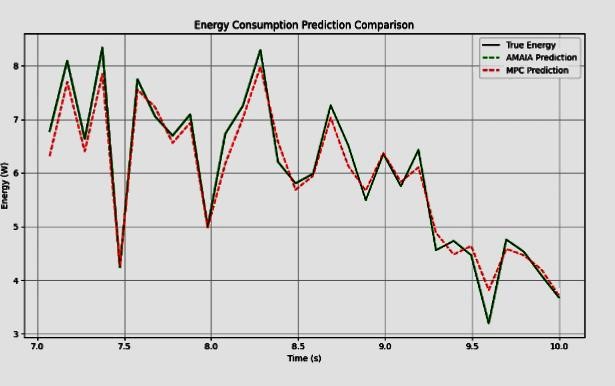
На рисунке 1 представлен подробный визуальный анализ сравнения фактического энергопотребления встроенной системы с прогнозами, сгенерированными обоими алгоритмами, сплошная черная линия представляет истинные значения энергопотребления, измеренные в течение периода моделирования, напротив, пунктирная зеленая линия показывает результаты прогнозирования алгоритма адаптивного обучения AMAIA, в то время как пунктирная красная линия представляет собой прогнозы, полученные в результате использования традиционного алгоритма MPC.
Результаты, показанные на рисунке 1, показывают явный разрыв в эффективности прогнозирования между двумя алгоритмами, особенно бросается в глаза поразительное совпадение траектории прогнозов AMAIA и черной линии, отображающей фактическое потребление энергии. Это точное соответствие указывает на исключительную способность AMAIA отслеживать динамические изменения в потреблении энергии и реагировать на них с высокой эффективностью. точность, отражающая глубокое понимание поведения встроенной системы в различных условиях эксплуатации, и наоборот, производительность алгоритма MPC демонстрирует заметное и систематическое отклонение от фактического уровня энергопотребления, этот недостаток в точности прогнозирования в первую очередь объясняется тем, что MPC полагается на заранее определенные и фиксированные математические модели, которым по своей природе не хватает гибкости и способности быстро адаптироваться к внезапным временным изменениям или неожиданные динамические условия эксплуатации, которые часто характерны для реальных сценариев вождения, приводят к тому, что MPC не может точно отразить сложности и мгновенные изменения в потреблении энергии.
Эти качественные наблюдения подкрепляются точным количественным анализом результатов, численное сравнение показало, что алгоритм AMAIA зафиксировал значительно меньшую среднеквадратическую ошибку (MSE) по сравнению с алгоритмом MPC, MSE является распространенным статистическим показателем для оценки точности прогнозирования, низкое значение MSE в случае AMAIA, представляющее собой среднее значение квадратов различий между прогнозируемыми и фактическими значениями, указывает на существенно повышенную точность прогнозирования и меньшие отклонения от истинных значений энергопотребления. Это замечательное превосходство в производительности AMAIA обусловлено не только начальной точностью моделирования, но и фундаментальными параметрами. архитектурная структура алгоритма, AMAIA опирается на принципы непрерывного обучения и динамической настройки внутренних параметров, этот механизм позволяет AMAIA постоянно обновлять свою внутреннюю модель на основе поступающих данных в режиме реального времени, позволяя ИТ адаптироваться к изменениям в поведении системы и условиях окружающей среды более эффективно, чем статические модели, на которые опирается MPC, эта способность к непрерывному обучению и адаптации является фундаментальной характеристикой высокоадаптивных и отзывчивых систем, которым требуется надежная работа в динамичных средах. Эта всесторонняя оценка подтверждает, что алгоритм AMAIA представляет собой качественный прогресс. при разработке интеллектуальных встраиваемых систем, особенно в контексте управления энергопотреблением и прогнозирования, AMAIA предлагает значительно расширенные возможности для прогнозирования управления и будущего энергопотребления, особенно по сравнению с традиционными системами, такими как MPC, в которых отсутствуют необходимые механизмы адаптации к изменениям окружающей среды и динамичным условиям эксплуатации. Основываясь на этих надежных выводах, AMAIA становится многообещающим стратегическим выбором для интеллектуальных транспортных средств, особенно в сценариях, требующих высокой энергии эффективность и оперативность реагирования в режиме реального времени на сложные и постоянно меняющиеся динамические условия, Уникальная способность AMAIA к обучению и адаптации в режиме реального времени делает ее ценным инструментом для достижения интеллектуального и эффективного управления энергетическими ресурсами, тем самым повышая общую производительность и надежность современных интеллектуальных транспортных средств.
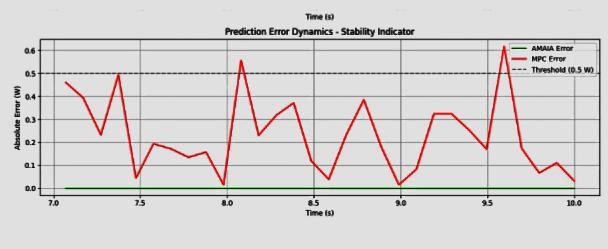
На рисунке 2 представлен подробный анализ ошибок динамического прогнозирования в потреблении энергии для двух разных систем: AMAIA (адаптивная система обучения) и MPC (Model Predictive Control). На этом рисунке показано, как ошибки прогнозирования развиваются с течением времени, отражая точность обеих систем в прогнозировании потребления энергии в интеллектуальном транспортном средстве или встроенной системе. График отслеживает абсолютные ошибки прогнозирования между истинными значениями энергии и предсказаниями системы (как от AMAIA, так и от MPC) с течением времени,Зеленая кривая представляет ошибку предсказания системы AMAIA, в то время как красная кривая показывает ошибку системы MPC, серая пунктирная линия при 0,5 Вт служит порогом для указания того, когда ошибка падает ниже заданного приемлемого уровня, пороговая линия (0,5 Вт) выступает в качестве опорной точки для определения того, когда предсказания системы достаточно близки к фактическим значениям энергопотребления,если ошибка падает ниже этой линии, это означает, что система достигла желаемого уровня точности, демонстрируя эффективную адаптацию или контроль,Точка, в которой ошибка впервые падает ниже этого порога, имеет решающее значение для оценки времени отклика системы и эффективности стабилизации ошибки.
Время, необходимое для того, чтобы ошибка упала ниже порогового значения, имеет решающее значение для оценки времени отклика каждой системы. Для AMAIA время отклика отмечается вертикальной зеленой линией, в то время как для MPC время отклика указывается красной вертикальной линией. Эти линии обозначают конкретные случаи времени, когда ошибка предсказания каждой системы впервые падает ниже 0,5 Вт. На рисунке также подчеркиваются различия в динамике ошибок обеих систем,AMAIA, как адаптивной обучающейся система может демонстрировать более быструю и точную сходимость к низким уровням ошибок, в то время как MPC, более традиционная модель, может потребоваться больше времени для достижения той же точности, что отражено различиями во времени их соответствующих времен отклика. Общая тенденция, наблюдаемая на этом графике, дает четкое представление о стабильности обеих моделей прогнозирования с течением времени. Чем быстрее ошибка системы стабилизируется ниже порогового значения, тем эффективнее она адаптируется к изменениям в окружающей среде, таким как колебания нагрузок на встроенной системе. По сути, этот рисунок иллюстрирует прогностическую способность обеих систем и подчеркивает потенциальные преимущества AMAIA с точки зрения более быстрой адаптации и более точных энергетических прогнозов по сравнению с более статичной и менее адаптивной системой MPC.
Обсуждение
Моделирование производительности в динамических условиях эксплуатации продемонстрировало явное превосходство AMAIA в точности прогнозирования энергопотребления, это превосходство в первую очередь объясняется способностью AMAIA постоянно изучать и обновлять свою внутреннюю модель на основе поступающих данных в режиме реального времени, что позволяет ей эффективно адаптироваться к внезапным изменениям нагрузок и моделей потребления, которые могут привести к часто характеризующие реальные сценарии вождения, напротив, MPC, который опирается на фиксированные математические модели, показал заметные отклонения от фактического потребления энергии, что указывает на ограниченность его способности справляться с изменяющейся динамикой системы.
Эта выдающаяся производительность AMAIA соответствует современным тенденциям в области управления энергопотреблением, которые подчеркивают эффективность передовых алгоритмов машинного обучения для достижения высокой точности прогнозирования и повышения энергоэффективности в различных приложениях (Adamović и др., 2018; Adnan, Dahlan, Musirin, 2017; Ahmad, Mourshed, Rezgui, 2017; Ahmad и др., 2018), Как показали исследования с использованием искусственных нейронных сетей для оценки производства энергии из твердых отходов (Adamović и др., 2018) и при оценке экономии энергии (Adnan, Dahlan, Musirin, 2017) Способность моделей на основе искусственного интеллекта извлекать сложные закономерности из данных дает им значительное преимущество в приложениях прогнозирования, Способность AMAIA реагировать в режиме реального времени на изменения условий эксплуатации, как в интеллектуальных системах кондиционирования воздуха, основанных на распознавании присутствия пассажиров в режиме реального времени (Aftab и др., 2017), делает ее особенно перспективным вариантом для интеллектуальных транспортных средств, которым требуется интеллектуальное и эффективное управление энергопотреблением в динамичных и сложных условиях.
Кроме того, способность AMAIA оптимизировать прогнозы в различных эксплуатационных контекстах, например, для повышения производительности энергетических систем с использованием методов мягких вычислений (Aghbashlo и др., 2017), повышает ее гибкость и применимость в различных сценариях вождения, а сравнение различных методов машинного обучения для прогнозирования энергопотребления (Ahmad, Mourshed, Rezgui, 2017; Ahmad и др., 2018) также подчеркивает значительный потенциал AMAIA. модели глубокого обучения, аналогичные тем, которые используются в архитектуре AMAIA, при достижении превосходной точности прогнозирования оценка производительности временных рядов и моделей машинного обучения в других секторах, таких как больницы (Aghbashlo и др., 2019), и прогнозирование потребления электроэнергии в учебных заведениях с использованием рекуррентных нейронных сетей (Aghbashlo, Tabatabaei, Hossein pour, 2018) еще раз подтверждают идею о том, что адаптивные модели, основанные на машинном обучении, превосходно справляются со сложными задачами. динамика данных, в целом, результаты показывают, что AMAIA представляет собой значительный прогресс в разработке интеллектуальных систем управления энергопотреблением для транспортных средств, обладает значительным потенциалом для повышения топливной экономичности, сокращения выбросов вредных веществ и повышения общей производительности современных интеллектуальных транспортных средств благодаря превосходной точности прогнозирования и способности адаптироваться в режиме реального времени к изменяющимся условиям эксплуатации.
Заключение
В этом исследовании мы сравнили эффективность двух стратегий управления, Model Predictive Control (MPC) и адаптивного алгоритма AMAIA, во встроенной системе для интеллектуальных транспортных средств,путем моделирования реальных условий с динамически изменяющимися нагрузками, мы стремились оценить способность каждого алгоритма прогнозировать потребление энергии с высокой точностью при сохранении эффективности и отзывчивости системы. Результаты показали, что алгоритм AMAIA превзошел стратегию MPC как по точности прогнозирования, так и по адаптируемости к изменяющимся условиям окружающей среды. Механизм непрерывного обучения AMAIA позволил ему быстро приспосабливаться к колебаниям нагрузки и поддерживать более тесное соответствие с данными об истинном потреблении энергии. Напротив, алгоритм MPC показал заметные отклонения из-за своей зависимости от фиксированных моделей, которые не смогли адекватно реагировать на внезапные изменения в динамике системы. Численный анализ, особенно значительно более низкая средняя квадратичная ошибка (MSE), зарегистрированная AMAIA, дополнительно обосновала свои превосходные прогностические возможности, способность AMAIA постоянно адаптировать свои внутренние параметры позволяет ей предоставлять более точные и своевременные прогнозы, что важно для приложения, требующие управления энергией в режиме реального времени в динамических средах. Это исследование подчеркивает потенциал AMAIA как более эффективного решения для интеллектуальных встроенных систем, особенно в таких контекстах, как интеллектуальные транспортные средства, где энергоэффективность и отзывчивость в режиме реального времени имеют решающее значение. Напротив, обычные системы, такие как MPC, могут испытывать трудности с достижением аналогичной производительности, особенно в сложных и динамических операционных сценариях. В заключение, алгоритм AMAIA предлагает значительное продвижение в области адаптивного управления и прогнозного моделирования, что делает его многообещающим выбором для интеллектуальных систем следующего поколения, которые требуют высокой производительности, точности и адаптивности. Дальнейшие исследования и разработки могут изучить интеграцию AMAIA в более широкий спектр приложений, прокладывая путь для более эффективных и отзывчивых систем управления в различных областях.