Изучение психологических механизмов организации двигательного навыка давно находится под пристальным вниманием исследователей. Еще Н. А. Бернштейн предлагал многоуровневую систему координаций двигательного навыка, каждый уровень которой отвечал за проведение движений различной сложности и использовался вышестоящими как основа для реализации более сложных (Бернштейн, 2004). Для настоящего исследования представляет интерес понимание Бернштейном механизма научения: вышестоящие, «ведущие» в терминологии Бернштейна, уровни во время обучения временно замещают функции нижележащих уровней. Каждый уровень обладает уникальными сенсорными каналами для получения обратной связи. Обратная связь в концепции Н. А Бернштейна – необходимая основа построения движения, при отсутствии которой движение совершенно невозможно. Речь идет не просто о моторном научении, а о научении процессу сенсомоторной координации, позволяющему реализовать движение. Спровоцированная научением смена ведущего уровня необходимо должна вести к изменению самого движения.
Н. Д. Гордеева детально исследовала изменения, претерпеваемые движением в ходе научения. Результатом этих исследований стало экспериментальное обнаружение микроструктуры двигательного навыка (различных фаз выполнения движения с характерной временной протяженностью в десятки микросекунд и разнообразной функциональной нагрузкой) и перестройки микроструктуры в процессе научения и при внесении разнообразных помех, например, при инверсии двигательного поля (Гордеева, 1982). Наличие микроструктуры ярко демонстрирует участие в организации движения целого ряда автоматизмов, а ее изменение в ходе научения – наличие качественно различных типов этих автоматизированных процессов.
Различие механизмов регуляции движения необходимо ведет к различию качественных характеристик реализуемых ими движений. Обобщенно процесс научения двигательному навыку можно описать как все большую автоматизацию сенсомоторной координации, уход из сознания процессов контроля. Логично предполагать, что сознание, непосредственно участвуя в контроле движения, опирается на доступные ему каналы сенсорной обратной связи, а значит, разучиваемый навык до перехода в автоматизированное состояние должен обнаруживать ряд ограничений, характерных для восприятия. Но каковы каналы сенсорной обратной связи у уже автоматизированного навыка?
Исчерпывающий ответ на данный вопрос дают концепции перцептивно-моторной диссоциации (Сергиенко, 2004; Cardoso-Leite, 2010), утверждающие наличие двух систем репрезентации окружающего мира, так называемых систем «что» и «как». Если первая система обеспечивает восприятие объектов сознанием, то система «как» отвечает за организацию движений, направленных на разнообразные объекты, и осуществляет все необходимые операции практически без ведома сознания. Эксперименты демонстрируют значительное превосходство система «как» в оценке параметров, необходимых для организации движения: меньшую подверженность зрительным иллюзиям (Goodale, 1998), повышенные пороги чувствительности (Goodale, 2008), кроме этого, система «как» опирается более на проприорецепцию, чем на дистантные органы чувств, что обеспечивает независимость от системы «что», опирающейся на зрение. Вышеизложенное приводит к выводу о том, что точность выполнения автоматизированного действия может превосходить возможности зрительной обратной связи.
Описание эксперимента. Экспериментальное оборудование состояло из персонального компьютера и дигитайзера. На экране монитора изображались: большой круг (стартовая позиция), курсор (в виде маленького круга), окружность, отмечающая границу безопасной зоны (центры окружности и стартовой позиции совпадают). Испытуемый, используя перо дигитайзера, приводит курсор на старт, после чего появляется еще один круг с центром, лежащим на границе безопасной зоны (ворота), размер ворот чуть больше размера курсора (рисунок 1). От испытуемого требуется вывести курсор из безопасной зоны через ворота, как только курсор пересечет границу (видимую как окружность), ворота исчезают, вычисляется расстояние от траектории курсора до центра ворот и дается испытуемому в виде обратной связи. Затем испытуемый приводит курсор на старт, после чего появляется следующая мишень. Каждый испытуемый проходит подряд по 300 попыток.
Положение пера на планшете фиксировалось с точностью до 0,25 мм (шаг между соседними позициями на планшете равен этой величине), передаточное число было подобрано таким образом, чтобы смещению курсора на один пиксель соответствовало перемещение пера на 0,37 мм. В результате точность зрительной обратной связи о ходе выполнения задания была значительно ниже точности фиксации движения пера, и испытуемый физически не мог корректировать движение с точностью до позиции планшета, опираясь на зрительную обратную связь.
Настоящее исследование посвящено проверке гипотезы о возможности реализации движения с точностью, превышающей точность зрительной обратной связи. Испытуемый, совмещая курсор с центром ворот, даже наблюдая идеальное совпадение курсора с целью, мог допустить очень малое (субпиксельное), но регистрируемое отклонение. Распределение этих, очень малых, отклонений должно быть однородным в случае, если контроль движения осуществляется исключительно посредством зрительной обратной связи. Но если в контроль движения вовлечены иные перцептивные системы, в диапазоне субпиксельных отклонений будут преобладать нулевые и околонулевые значения.
Эксперимент проводился по двухфакторной схеме. Варьировались степень изученности навыка и точность обратной связи. Для разрушения двигательного навыка применялась инверсия сенсорного поля (изображение на экране) относительно моторного (положение пера на планшете). При инверсии нарушается сенсомоторная координация, что приводит к деавтоматизации навыка, в результате действие протекает подобно вновь разучиваемому навыку. После каждого проведения курсора через ворота испытуемому сообщалась величина отклонения от центра ворот. Варьировалось два уровня точности обратной связи о результативности движения: точная, когда отклонение от центра ворот измерялось в позициях планшета между курсором и центром ворот; и загрубленная, при которой отклонение измерялось в пикселях. Вне зависимости от точности обратной связи, отклонение всегда протоколировалось в позициях планшета.
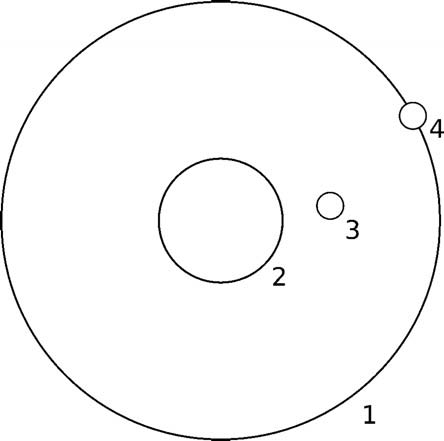
Рис. 1. Схема рабочего поля. 1 – граница безопасной зоны; 2 – стартовая позиция; 3 – курсор; 4 – ворота
Таблица 1 Распределение частот нулевого отклонения в субпиксельном диапазоне в зависимости от условий выполнения действия
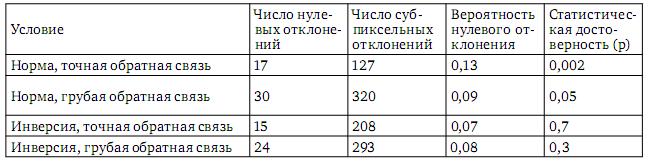
Результаты эксперимента представлены в таблице 1. Хорошо заметно, что в нормальном пространстве, при высокой точности обратной связи, частота нулевых отклонений в субпиксельном диапазоне значимо выше теоретически ожидаемой величины 0,067 (p = 0,002, критерий χ2, X = 9,21), эффект менее выражен при загрубленной обратной связи, и отсутствует в случае инверсии пространства.
Иначе говоря, испытуемые способны выводить курсор в центр ворот с точностью, превышающую точность зрительной обратной связи в ходе выполнения задания. Эта сверхточность зависит, прежде всего, от наличия или отсутствия инверсии пространства, влияние точности обратной связи выражено слабее.
Возвращаясь к изложенным в теоретической части положениям, логично объяснить наблюдаемое как проявление переключения между различными системами контроля двигательного акта. Система, доминирующая на этапе разучивания двигательного навыка (в условиях инвертированного пространства), опирается на визуальную афферентацию (систему «что» в терминах парадигмы перцептивномоторной диссоциации), что приводит к равномерному распределению отклонений в субпиксельном диапазоне. Но в случае, если навык уже хорошо освоен (выполнение задания в нормальных условиях), в управление движением вовлекаются другие каналы получения обратной связи (предположительно, проприоцептивные каналы системы «как»).
Интересен эффект влияния детальности обратной связи о результате на выраженность сверхточности: при высокой точности обратной связи о результате (превышающей физическую точность визуально наблюдаемых индикаторов) сверхточность более выражена, чем в случае с информацией о результате, адекватной визуально наблюдаемой испытуемым картине. Другими словами, обратная связь влияет на функционирование неосознаваемых механизмов контроля движения. Подобную картину наблюдал в своих экспериментах В. В. Плохих (Плохих, 2009), показав влияние обратной связи на эффективность выполнения действия: чем адекватней обратная связь поставленной задаче действия, тем результативней выполнение задания. Особенно стоит отметить, что критерием эффективности в экспериментах Плохих выступало время реакции, т. е. величина, характеризующая почти не подверженные произвольной регулировке процессы.
Исследование позволяет поставить вопрос о роли взаимодействия систем «что» и «как» в процессе выработки моторного навыка: считается, что эти системы радикально различаются по способу репрезентации информации о положении объектов (Bertenthal, 1996), и для реализации любого целенаправленного движения требуется отобразить данные о визуально наблюдаемом предмете, предоставляемые системой «что», в репрезентацию объекта внутри системы «как». Последняя репрезентация функционально играет роль организующего выполнение движения задания для моторной системы. Естественно, точность такой репрезентации окажет решающее влияние на эффективность выполнения задания. Наблюдаемое в эксперименте исчезновение сверхточности в условиях инвертированного пространства может интерпретироваться как нарушение взаимодействия систем «что» и «как», возникающее при выработке нового навыка. Вероятно, восстановление взаимодействия этих двух систем представляет одну из задач, решаемых в ходе моторного научения.