Введение
В современной психологии дорожного движения, фокусирующей внимание на различных аспектах передвижения участников дорожно-транспортной среды, представляется весьма актуальным поиск и описание такого теоретического конструкта, который позволил бы рассматривать взаимодействие водителей в процессе управления транспортным средством.
Проведенный теоретический анализ по данной проблематике заставил нас обратить внимание на стратегии взаимодействия в трафике или стратегии вождения [3; 5].
Так, анализ литературы по данной проблематике позволяет констатировать, что сегодня изучение данных об особенностях различных аспектов поведения водителя вызывает значительный интерес среди представителей самых разных направлений и научных школ, на что указывает рост количества исследований междисциплинарного характера, посвященных изучению различных паттернов, характеризующих управление транспортным средством [6; 8; 9; 12].
К числу таких поведенческих паттернов в отечественной психологии относят стилистические особенности и, таким образом, рассматривают стиль управления транспортным средством, который связывают с индивидуальным стилем деятельности [12; 13] — системой психологических средств, к которым сознательно или стихийно прибегает человек в целях наилучшего уравновешивания своей (типологически обусловленной) индивидуальности с предметными, внешними условиями деятельности [7].
Нетрудно заметить, что акцент на исследование стилистических особенностей управления транспортным средством не предполагает изучения социально-психологических аспектов взаимодействия водителей как участников дорожного трафика. Учитывая, что дорожный трафик представляет собой сложную социальную систему, в которую включено множество различных участников — субъектов передвижения, необходимо уделить внимание рассмотрению особенностей вождения автомобиля, которые характеризуют поведение водителя в широком диапазоне взаимодействия с другими участниками транспортного потока [4; 5]. Такое взаимодействие, на наш взгляд, может охарактеризовать поведение водителя содержательно в контексте его передвижения относительно других водителей, находящихся рядом в транспортном потоке.
В этой связи представляется целесообразным использовать понятие «стратегия вождения». Важно подчеркнуть, что данное понятие нуждается в конкретизации и уточнении, а также в необходимости разработки методических приемов и способов для комплексного изучения данных поведенческих проявлений [3; 5].
Предельно обобщая результаты исследований, посвященных изучению стратегических поведенческих особенностей в целом, можно выделить несколько аспектов их рассмотрения и трактовки. Так, например, под стратегией поведения в социальной психологии понимается общая направленность поведения, которая просматривается в долговременной перспективе и связана с самыми общими, базовыми, установками личности [10]. Основаниями для таких установок являются ценностные ориентации личности, которые регулируют поведение человека не на тактическом, ситуативном, уровне, а в долговременной перспективе, в повторяющемся поведении [14].
Исходя из такой трактовки стратегических поведенческих особенностей, мы будем понимать под стратегией вождения многократно повторяющиеся паттерны дорожного поведения [6, с. 14—21] водителя, которые характеризует его взаимодействие с другими участниками транспортного потока при передвижении.
Данные теоретические представления послужили основанием для построения нейросетевой модели [1; 2; 11] распознавания стратегий вождения — взаимодействия водителей в условиях дорожного трафика.
Характеристика и описание модели нейронной сети
Под взаимодействием мы имеем в виду ситуацию, когда два передвигающихся транспортных средства влияют на изменения скорости и/или траектории друг друга. Таким образом, мы «разделяем» весь транспортный поток на диады автомобилей (водителей), подходящие под следующие условия:
Догоняющий автомобиль имеет большую скорость (иначе взаимодействие не состоится).
Один или оба автомобиля (водителя) вынуждены изменить скорости и/или траектории под воздействием друг на друга.
Для наглядности представим данные условия на рис. 1.
Из рис. 1 видно, что диада автомобилей А1 и А2 не взаимодействуют между собой, в то время как между диадой В1 и В2 имеется взаимодействие.
Особенности такого взаимодействия, которые являются устойчивыми и носят повторяющийся характер, мы будем рассматривать в качестве стратегий вождения, а их распознавание и становится основной задачей для разработки нейронной сети и ее обучения такому рас- познаванию1.
Мы моделируем эту ситуацию и передаем на вход нейронной сети следующие данные по отобранным диадам (взаимодействующих) автомобилей (водителей).

В работе мы используем нейронную сеть, основанную на базе самоорганизующейся карты (SOM) Кохонена [17], состоящей из группы сетей на радиально-базисных функциях (RBF), а также карту из 256 (16 х 16) сетей. Подобная архитектура использовалась в работах Лаборатории искусственного интеллекта в Массачусетском технологическом институте [19; 20; 21], а также в работах группы ученых из Университета Киото [18].
Использование самоорганизующейся карты, состоящей из RBF-сетей, позволяет выстраивать многомерную топологию между всеми исследуемыми данными, используя обучение нейронной сети без учителя2, и отобразить ее в двухмерном пространстве. Необходимо отметить, что подобная архитектура нейронной сети [15] имеет биологическое правдоподобие, ее структура представлена на рис. 2 [16].
Наша сеть устроена как SOM из 256 функциональных РБФ -модулей, организованных в виде квадратной решетки 16 х 16.
Отметим, что алгоритм SOM включает в себя четыре основных процесса: оценочный процесс, соревновательный процесс, кооперативный процесс и адаптивный процесс [3; 22].
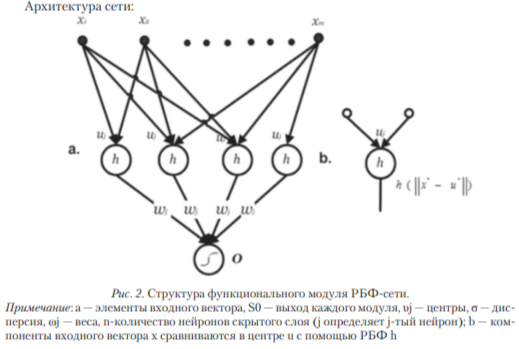
Нейроны скрытого слоя каждого модуля представляют собой функции Гаусса — см. рис. 2. Первоначально веса определяются случайным образом на интервале [0,25—0,75]. В оценочном процессе выходы всех функциональных модулей рассчитываются для каждой
пары векторов входов-выходов:

В процессе обучения модуль с наименьшей ошибкой определяется как модуль-победитель. Ошибка вычисляется следующим образом:
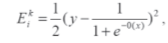
где y определяет делаемый выход (здесь y = 1). В кооперативном процессе обучаемые коэффициенты рассчитываются с помощью функции соседства:
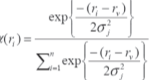
где ri — позиция i-того RBF-модуля на карте, rγ — позиция модуля с минимальной ошибкой, а σ — параметр функции соседства. В процессе обучения все элементы изменяются по алгоритму обратного распространения ошибки.
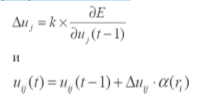
Таким образом:
Алгоритм обратного распространения ошибки повторяется до тех пор, пока все элементы не обучатся. В процессе обучения постепенно уменьшается окрестность функции соседства — до тех пор, пока сеть не достигнет стабильного состояния.
В связи с неоднородностью данных нам пришлось увеличить число нейронов внутреннего слоя n 2 до 3, что, в свою очередь, позволило повысить уровень распознавания сети.Исходные данные
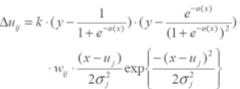
Наша модель подразумевает, что мы берем пять кадров из стационарно расположенной камеры на некотором участке дороги и для каждой диады автомобилей и используем в качестве входного вектора дистанцию между машинами, а также изменение положения автомобилей относительно друг друга по оси дороги — рис. 3.
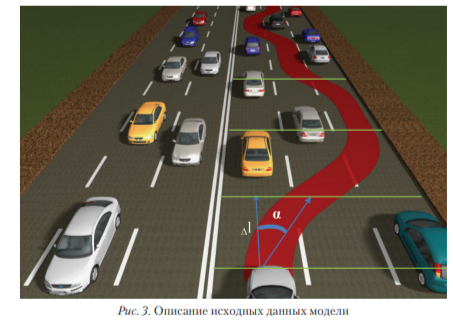
Далее мы генерируем 500 ситуаций, относящихся к пяти разным видам стратегий взаимодействий двух автомобилей в транспортном потоке [5]:
1. Стратегия конкуренции. Автомо6иль A двигается с большей скоростью, чем автомобиль Б, и начинает
манер обгона. Водитель автомобиля Б ускоряется, из-за чего автомобиль А прекращает маневр и возвращается в полосу.
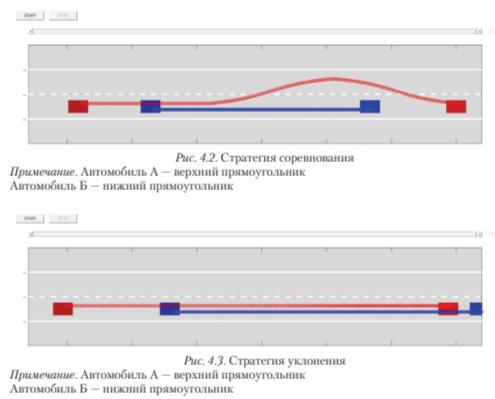
2. Стратегия соревнования. Автомобиль А движется с большей скоростью, чем автомобиль Б. Водитель автомобиля А совершает маневр обгона и возвращается в свою полосу. Водитель автомобиля Б не меняет скорость движения.
3. Стратегия уклонения. Автомобиль А движется с большей скоростью, чем автомобиль Б. Приближаясь к автомобилю Б, водитель автомобиля А снижает скорость до скорости автомобиля Б и движется за ним.
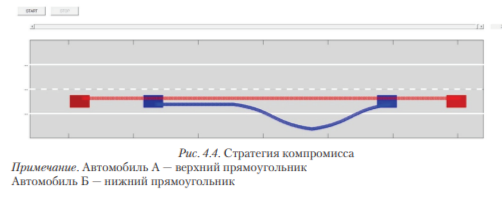
4. Стратегия компромисса. Автомобиль движется с большей скоростью, чем автомобиль Б. Водитель автомобиля Б меняет полосу движения, пропуская автомобиль А, и возвращается обратно после того, как автомобиль А проезжает мимо.
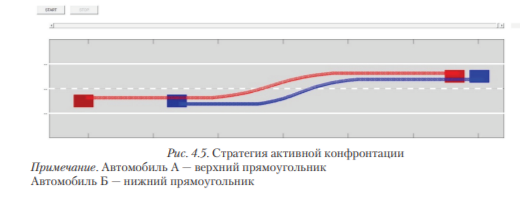
5. Стратегия активной конфронтации. Автомобиль А движется с большей скоростью, чем автомобиль Б. Приближаясь к автомобилю Б, водитель автомобиля А начинает маневр обгона. Водитель автомобиля Б перестраивается в полосу левее, не меняя своей скорости. Водитель автомобиля А вынужденно тормозит до скорости автомобиля Б.
Далее для более реалистичного моделирования начальные скорости взаимодействующих автомобилей заданы в промежутке от 40 до 80 км/ч и рассчитаны случайным образом.
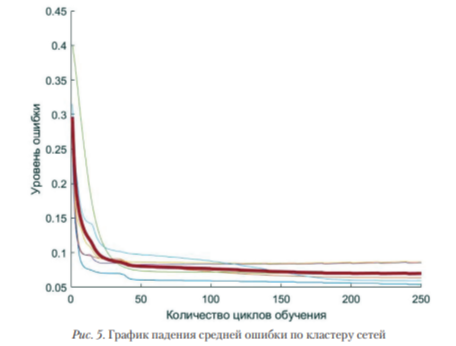
Обучение сети осуществляется путем прогона обучающих данных к 500 ситуациям взаимодействия в течение 250 итераций. Контроль такого обучения можно увидеть при изучении графика падения средней ошибки по всему кластеру сетей на рис. 5.
Визуально границы между кластерами SOM-сети можно увидеть на рис. 6.

Далее представлены зоны распознавания для каждой из пяти стратегий вождения, представленных в пяти описанных выше дорожных ситуациях (черным выделены сети с нулевым откликом на данные, чем светлее, тем выше отклик) — рис. 7.

Представленная нейронная сеть может служить основой для разработки более сложных моделей, распознающих другие паттерны дорожного поведения, связанного, например, с поведением в скоростном режиме, максимальной скоростью транспортного потока и многим другим. Как уже отмечалось, представленный алгоритм является модификацией SOM и включает в себя основу для построения самоорганизущейся карты, состоящей из RBF-модулей.
Заключение
Можно констатировать, что предложена и реализована модель распознавания стратегий вождения автомобиля, характеризующих взаимодействие диад автомобилей (водителей), передвигающихся в транспортном потоке, основанная на архитектуре самоорганизущейся карты SOM.
В настоящей модели SOM не только наследует многие свойства классических самоорганизующихся карт, но и добавляет некоторые новые свойства [18].
Необходимо подчеркнуть, что разработанная нами модель нейронной сети никоим образом не претендует на то, чтобы считаться совершенной, и может нуждаться в дальнейшей доработке. Тем не менее ее можно рассматривать как определенный результат междисциплинарного синтеза научного знания — нейронауки и социально-психологического знания, которое направлено на изучение процессов взаимодействия участников самых различных социальных систем.
Такой синтез не только способен существенно расширить представления о человеке и его дорожном поведении, но и имеет важную практическую направленность и ценность, поскольку изучение и дальнейшее распознавание стратегических поведенческих паттернов водителей сможет помочь в решении проблемы снижения количества аварийности и предотвращения дорожно-транспортных происшествий.
[*] Ефремов Сергей Борисович — аспирант, кафедра психологии управления, факультет социальной психологии, ФГБОУ ВО МГППУ, Москва, Россия, 0971090@gmail.com