Введение
Более чем полуторавековая история изучения кинематических характеристик движений глаз характеризуется постепенным совершенствованием регистрирующих методов, позволяющих получать объективные данные о закономерностях пространственного позиционирования органа зрения, обеспечивающего человека важнейшей информацией об окружающей среде.
Среди разнообразных видов глазодвигательной активности наименее изучены так называемые торзионные, ротаторные или противовращательные движения глаз (ТДГ), т. е. вращения глазного яблока относительно зрительной оси. Это связано прежде всего с тем, что основная масса исследований в данной области была выполнена при фиксированной голове наблюдателя, тогда как основным условием возникновения торзионных поворотов глаз является изменение положения головы относительно гравитационной вертикали.
Между тем, нистагмоидные противовращения глаз вокруг зрительной оси при наклоне головы наблюдателя к плечу были описаны еще в 1786 году Джоном Хантером (Hunter, 1786), наблюдавшим за поведением сосудов коньюктивы глаза другого человека.
Дальнейшая история изучения ТДГ характеризуется серьезными расхождениями в динамических и метрических оценках торзионных поворотов, что было связано с отсутствием объективных методов регистрации и неразличением истинной и ложной торзии. Даже такой авторитет в физиологии зрения как Дондерс сначала отрицал сам факт противовращательных движений глаз при наклоне головы, пытаясь наблюдать за своими глазами в зеркале, прикрепленном к пластинке, которую он удерживал своими зубами. Однако впоследствии, под влиянием наблюдений Джавала (Javal, 1866), заметившего расхождение между осью астигматизма своих глаз и осью астигматизма своих очковых линз при наклоне головы, а также экспериментов своего ассистента Малдера с последовательными образами, Дондерс вынужден был признать существование как статической, так и динамической торзии (Donders, 1875), противопоставляя эту «истинную» торзию «ложной» торзии, связанной с выбором ортогональной системы отсчета для измерения поворотов глазного яблока.
С некоторыми допущениями можно считать, что глаз вращается внутри орбит относительно фиксированного центра, смещенного примерно на
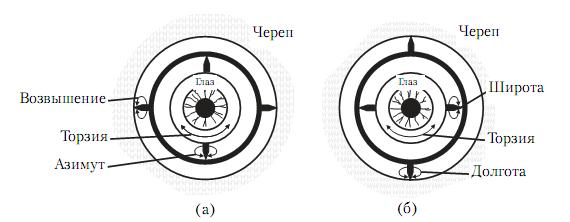
Рис. 1. Системы осей, используемые для спецификации позиций глаза: (а) система осей Гельмгольца; (б) система осей Фика
Однако несмотря на кажущуюся схожесть этих двух координатных систем, ориентация вертикального меридиана глаза при перемещении из первичной (в центре орбит) в третичную (в направлении между вертикалью и горизонталью) позицию будет совпадать с объективной вертикалью в системе координат Фика и систематически отклоняться от нее в системе координат Гельмгольца. Надо подчеркнуть, что природа этих различий заключается не в последовательности движений глаз, а в иерархии осей вращения, которыми оперирует каждая из этих координатных систем.
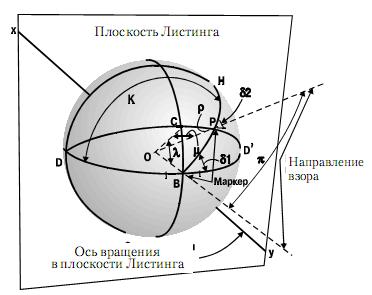
Для преодоления этих трудностей Листинг предложил использовать полярную координатную систему, имеющую только две степени свободы. Согласно «закону Листинга», поворот глаза происходит вокруг единственной оси, расположенной в экваториальной плоскости («плоскость Листинга»), проходящей через центр вращения глаза, находящегося в первичной позиции. Таким образом, координатами этой системы являются наклон этой оси и угол вращения относительно нее. Никаких ТДГ система координат Листинга не предусматривает. Следствием такого описания является то, что меридиан глаза, который в первичной позиции совпадает с гравитационной вертикалью, не меняет своей ориентации при перемещении глаза во вторичную позицию (строго назально-темпорально или вверх-вниз), но систематически отклоняется от вертикали в любой третичной позиции. Это отклонение меньше, чем в системе координат Гельмгольца, а в системе координат Фика, как мы отмечали выше, такое отклонение отсутствует (рис. 2). Для того чтобы достичь той же третичной позиции глаза, которую предсказывает система координат Листинга, системы координат Фика и Гельмгольца должны быть повернуты относительно зрительной оси, но в разные стороны. Такое вращение было названо «ложной торзией», или циклоторзией по отношению к объективной вертикали (Boeder, 1957).
 Дондерс обобщил закон Листинга и сформулировал положение, что торзионная позиция глаз для данной позиции взора не зависит от траектории, по которой они двигались, чтобы достичь этой позиции. Другими словами, «закон Дондерса», как назвал его Гельмгольц, предсказывает отсутствие гистерезиса, или коммутативность движений глаз.
Дондерс обобщил закон Листинга и сформулировал положение, что торзионная позиция глаз для данной позиции взора не зависит от траектории, по которой они двигались, чтобы достичь этой позиции. Другими словами, «закон Дондерса», как назвал его Гельмгольц, предсказывает отсутствие гистерезиса, или коммутативность движений глаз.
Кроме ложной торзии, связанной с углом отклонения глаза и выбором системы координат для измерения этого типа движений глаз, а также противовращательного нистагма, возникающего при активных наклонах головы во фронтальной плоскости, и статического противовращения глаза, возникающего при устойчивом отклонении головы от гравитационной вертикали, в последнее время стали известны также следующие условия возникновения торзии:
оптостатическая торзия, условием возникновения которой является статический наклон структурированного изображения, занимающего большую часть поля зрения;
оптикинетический торзионный нистагм в ответ на вращение зрительного поля вокруг зрительной оси;
цикловергенция, стимулом для которой является циклодиспарантность;
циклофория, проявляющаяся в условиях отсутствия циклофузиональных стимулов; торзия в процессе вергенции, когда точка бификсации меняет свою удаленность от наблюдателя;
спонтанные флуктуации торзии, характеризующие неустойчивость фиксации; патологическая торзия, регистрируемая в условиях мозговой патологии; физиологическая торзия в ответ на калорическую или гальваническую стимуляцию внутреннего уха;
произвольная торзия, добиться которой помогает специальная тренировка.
Выявление столь разнообразной феноменологии торзионной активности глаз стало возможным благодаря развитию ряда новых методов регистрации. Ниже мы дадим краткий перечень существующих на сегодняшний день процедур и технических устройств для измерения ТДГ.
Классификация методов регистрации торзионных движений глаз
Субъективные методы
Наиболее старым методом, посредством которого удалось получить первые достоверные данные о динамике ТДГ, является создание на сетчатке глаза последовательного образа от яркого предмета или вспышки света. Чаще всего использовали образ отрезка вертикальной линии или креста. При вращении глаза последовательный образ не меняет свою ориентацию относительно меридиана глаза, так что ее можно сопоставлять с ориентацией неподвижных внешних объектов. Точность этого метода составляет от 3° до 10° (Fluur, 1975) и он более подходит для оценки статической торзии. Кроме того, известную неопределенность в оценки торзии глаза методом последовательных образов вносят такие перцептивные иллюзии наклона как феномены Ауберта и Мюллера, а также глазодвигательные автоматизмы, связанные с фиксацией послеобраза.
Известны также попытки использовать периметрию слепого пятна для измерения торзии глаза (Mulder, 1897). Понятно, что таким образом можно измерить только статическую торзию, и притом с большой погрешностью, так как процедура однократного картирования слепого пятна требует устойчивого положения глаза в течение нескольких десятков секунд.
Нагель (Nagel, 1871) использовал для измерения статической торзии свой астигматизм, глядя на рисунок лучевой фигуры, состоящий из 360 радиальных линий, который был прикреплен к подбороднику и вращался вместе с головой. Делаж (Delage, 1903) использовал собственную миопию и астигматизм, наблюдая за поведением дефокусированного эллиптического пятна от лампы. Изменение ориентации большой оси эллипса указывало на вращение глаза вокруг зрительной оси.
Объективные бесконтактные методы
Вращение глаза другого человека в орбитах можно увидеть, если обращать внимание на поведение склеральных кровеносных сосудов, пигментных пятен, границы между склерой и радужной оболочкой (лимбус) или роговичного блика от источника света. Барани (Barany, 1906) предложил измерять ТДГ объективно с помощью биомикроскопа, используя в качестве опорных точек контуры радужной оболочки глаза. Флюр (Fluur, 1975) усовершенствовал этот метод, приставив к глазу гониометрический окуляр от микроскопа, глядя в который наблюдатель мог отслеживать с помощью вращающихся относительно транспортира рисок перемещение тех или иных естественных меток глазного яблока. Точность этого метода составила 3°.
Развитием этого метода стало использование высокоскоростной фотографической регистрации движения глаз с последующим наложением увеличенных снимков и измерением угла поворота, необходимого для совмещения естественных меток глаза. Основоположник этого метода Миллер (Miller, 1962) использовал в качестве таких меток контуры радужной оболочки, а Ховард и Эванс (Howard, Evans, 1963), крепившие фотоаппарат на фиксированный относительно головы подбородник — эписклеральные вены. Иногда в качестве ориентационных меток глаза используют нанесенные на склеру чернильные линии (Watanabe et al., 1978) или линии, вмонтированные в контактные линзы (Edelman, 1978). Точность фотографического метода по Миллеру — ±5,3 угл. мин., скорость же фотографирования вращающегося глаза достигала максимально 10 снимков в секунду (Diamond et. al., 1979; Kellog, 1965).
Кинорегистрация позволяет повысить скорость съемки глаза до 64 кадров в секунду (Melvill Jones, 1963), но снижает точность измерения до ±1°, оставляя без изменения трудоемкий процесс покадрового сравнения изображений.
Развитие техники аналоговой, а впоследствии и цифровой видеорегистрации в комбинации с компьютерным анализом видеоизображений открыло широкие возможности для непрерывного измерения ТДГ (Diamond et. al., 1982; Hatamian, Anderson, 1983; Viéville, Masse, 1987). Измерения ведутся в инфракрасном свете и при подвижной голове. По различным оценкам, точность этого метода регистрации в условиях подвижной головы достигает 0,5°. Надо сказать, что на удобство и точность метода фото- и видеорегистрации оказывают существенное влияние индивидуальные особенности в строении и состоянии глаз как разных людей, так и одного и того же человека в разные моменты времени.
Объективные контактные методы
Крепление непосредственно к глазному яблоку различных визуальных меток, отражателей, излучателей или преобразователей световых или электромагнитных потоков позволяет реализовать целый ряд высокоточных методов регистрации движений глаз, в том числе и ТДГ. Этот подход использовали, например, Петров и Зенкин (Petrov, Zenkin, 1973), которые с помощью глазной присоски укрепляли на глазу испытуемого миниатюрную лампочку, отбрасывающую через диафрагму горизонтальный пучок света на щелевой фотокимограф. На том же фотокимографе аналогичным образом регистрировали и наклоны головы к плечу. К достоинствам этого метода можно отнести возможность получения непрерывной записи кинематических характеристик глаз при наклоне головы, к недостаткам — ограниченный диапазон использования и трудоемкость обработки данных.
Ряд исследователей использовали внешние фотоэлектрические преобразователи, на которые направлялся поток света, отраженный от одного (Kamada et al., 1976) или двух (Matin, Pearce, 1964) зеркал, укрепленных на контактной линзе. Взаимная ориентация отражателей и приемников (ПЗС камера или солнечные батареи) позволяла регистрировать на выходе электрический сигнал, коррелирующий с поворотом глаза относительно зрительной оси. Высокая чувствительность таких систем (несколько угловых минут) и аналоговый принцип регистрации не сочетались, однако, с приемлемой линейностью, что предполагает дополнительную математическую обработку получаемых записей.
Значительное распространение получил в настоящее время электромагнитный метод 3-мерной регистрации движений глаз, первоначально предложенный Робинсоном (Robinson, 1963) и впоследствии доработанный Коллевином с коллегами (Collewijn et al., 1975; Collewijn et al., 1985). Принцип этого метода состоит в следующем. Испытуемый помещается в пространство между двумя парами ортогонально расположенных излучающих катушек, между которыми образуется гомогенное электромагнитное поле. Частота переменного тока в излучающих катушках — 5000 Гц. На глаз испытуемого укрепляется контактная линза с отсосом (у Робинсона) или силиконовое торообразное кольцо, охватывающее роговицу (у Коллевина), к которым прикреплены две приемные катушки. Одна, предназначенная для регистрации горизонтальных и вертикальных движений глаз, расположена во фронтальной плоскости, другая — для ТДГ — в саггитальной плоскости. Поскольку измерение строится на определении величины фазовых задержек в индуцируемом в приемных катушках напряжении, то его результаты не зависят от положения головы внутри определенного пространства между излучающими катушками (куб со стороной
Нами (Белопольский, Вергилес, 1989) была разработана методика регистрации ТДГ, которая позволяет с большой точностью измерять текущее положение вертикального меридиана сетчатки вне зависимости от положения глаза в орбите и положения головы и туловища в пространстве. Она является модификацией ранее описанного метода (Левашов, Дмитриева, 1981), но обладает по сравнению с ним рядом преимуществ: высокой помехозащищенностью, широким диапазоном измеряемых углов ТДГ, а главное — возможностью регистрации ТДГ в процессе свободного поведения человека, чего не позволяют осуществить другие известные методы.
При разработке метода регистрации ТДГ мы исходили из следующих требований: 1) точность — не менее
Методика
Регистрация ТДГ
Идея предлагаемого фотоэлектрического метода состоит в использовании поляроида в качестве анализатора линейно поляризованного света. Его принципиальная схема представлена на рис. 3 и включает 3 основных блока. Блок осветителя (I) предназначен для засветки глаза равномерным потоком линейно поляризованного света. В блоке измерителя (II) происходит преобразование падающего на глаз света в электрический сигнал, пропорциональный углу поворота поляроида-анализатора. Блок регистрации (III) включает устройство усиления и записи сигнала, поступающего от блока II.
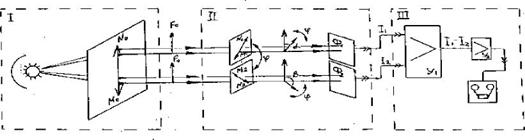
Рис. 3. Блок-схема метода фотоэлектрической регистрации торзионных движений глаз:
I — осветитель; II — измеритель; III — регистратор. M0N0, M1N1 и M2N2 — оси поляризации соответственно поляроида-поляризатора и поляроидов-анализаторов; F0 — вектор светового потока; á и â — углы между оптическими осями поляризатора и анализатора в начальной позиции; ϕ— угол ротаторного поворота глаза; Ф1 и Ф2 — фотоэлементы; I1 и I2 — электрический сигнал на выходе фотоэлементов; y1 — предусилитель; y2 — усилитель постоянного тока
В блоке I в качестве источника света использован светодиод красного свечения, помещенный в закрытый корпус вместе с электромагнитом, на подвижный контакт которого прикреплен пленочный поляроид-поляризатор. Излучаемый светодиодом световой поток проходит через поляризатор и выходит через окошко в корпусе осветителя. Включение электромагнита вызывает вращение поляризатора на фиксированный угол 10°и служит для калибровки записей ТДГ. Вся конструкция крепится к головному шлему с помощью многозвенного сочленения, имеющего достаточно степеней свободы для правильной установки осветителя с учетом индивидуальных особенностей обследуемых. Стандартная позиция осветителя — ниже и темпоральнее зрительной оси при направлении взгляда прямо вперед, расстояние до глаза 3–4 см. Такое расположение оставляет открытым почти все поле зрения и не мешает выполнению зрительных задач.
В блоке II измеритель объединяет в единую конструкцию 2 поляроида-анализатора с кремниевыми фотоэлектрическими датчиками (солнечные батареи) для каждого из них. Он крепится непосредственно на глазное яблоко с помощью центральной глазной присоски сбоку от тубуса, не загораживая и не ограничивая поля зрения измеряемого глаза (рис. 4). В соответствии с законом Малюса интенсивность линейно поляризованного света будет ослабляться на величину cos2ù (ù — угол между плоскостью поляризации падающего света и главной осью поляроида-анализатора).
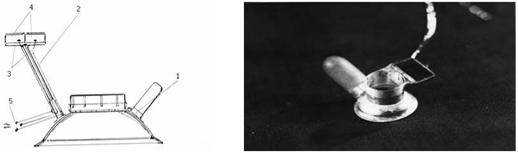
Рис. 4. Слева – схематическое изображение глазной присоски с фотоэлектрическим датчиком для регистрации торзионных движений глаз:
1 – корпус присоски; 2 – стойка фотоэлектрического датчика; 3 – кремниевые элементы; 4 – поляроидные фильтры, ориентированные под углом 90о, покрытые стеклом; 5 – выводы фотоэлектрического датчика; 6 – контакты питания катушки. Справа – фотография устройства
В исследованиях использовали 2 варианта измерителей с анализаторами, оси поляризации которых были расположены под углом 90° или 45° друг к другу. При установке на глаз они располагались симметрично относительно угла 90° от плоскости поляризации осветителя. Следовательно, в исходной позиции (голова прямо вверх) угол ù = á(â) был равен в первом случае 45° (135°), а во втором — 67,5° (112,5°). Пара поляроидов-анализаторов и балансная схема соединения фотоэлементов использована для большей помехозащищенности от флюктуаций освещенности, связанных с плоскостными движениями глаз и головы, и для лучшего шумоподавления. В этом состоит главное отличие нашего метода от прототипного (Левашов, Дмитриева, 1981). Каждый фотоэлемент регистрирует световой поток, проходящий через соответствующий поляроид-анализатор. Референтные (нулевые) выходы фотоэлементов соединены между собой и связаны с центральной точкой дифференциального усилителя. Следовательно, ТДГ на определенный угол ϕ приведет к пропорциональному изменению интенсивности пропускаемого анализатором и улавливаемого фотоэлементом светового потока (см. рис. 3). Следует учитывать, что измеритель устанавливается таким образом, чтобы увеличение сигнала на одном фотоэлементе вело к уменьшению сигнала на другом, т. е. симметрично относительно закрытого состояния поляроидов-анализаторов. Напротив, горизонтальное и вертикальное движение глаза и смещения головы не вызовут изменений в угле ù и, соответственно, в реакции фотоэлементов.
Измеритель с взаимно перпендикулярными осями поляризации анализаторов применяли для расширения диапазона регистрации ТДГ, теряя при этом в линейности записи. Однако эти потери меньше, чем были бы при использовании одного поляроидаанализатора (как в методике Левашова–Дмитриевой), за счет компенсационной схемы включения. Когда же исследуемый диапазон ТДГ был заведомо меньше ±20°, использовали измеритель с анализаторами, плоскости поляризации которых расположены под углом 45°. В этом случае линейность записи была выше. В целом же проблема линеаризации выходного сигнала успешно решается с помощью ЭВМ программным путем. Масса системы измерителя составляет около
Блок регистрации III включает дифференциальный предусилитель с диапазонами усиления входных сигналов от 50 мкВ, усилитель постоянного тока и регистратор данных на магнитную ленту или непосредственно в память ЭВМ. Коммутация усилителя с измерителем осуществляется через разъем, укрепленный на головном шлеме.
Регистрация наклонов головы и туловища
В лабораторных условиях для регистрации поворотов головы в плоскости плеч мы использовали механический гониометр, на ось которого укрепляли линейное переменное сопротивление, включенное в электрическую цепь для получения на выходе калиброванного сигнала об угле поворота головы. Фиксация оси гониометра относительно головы обеспечивалась путем зубного слепка, а сам потенциометр крепился к укрепленному на полу штативу. В натурных условиях — на плавучем стенде — для тех же целей использовали фотоэлектрическую систему, аналогичную той, которая применялась для регистрации ТДГ. Датчики крепились на шлеме со стороны затылка, осветитель располагался на треноге сзади испытуемого. Наклоны туловища, которое оставалось неподвижным в кресле, укрепленном на стенде, измеряли также посредством линейного переменного сопротивления как угол между гравитационной вертикалью (сигнал от гироскопа) и вертикальной осью плавучего экспериментального стенда, базирующегося на яхте.
 Процедура
Процедура
Серия лабораторных экспериментов. Испытуемые сидели в кресле самолетного типа; голова вертикально, взгляд прямо вперед. Испытуемого просили выполнить ряд задач.
Задача 1 — фиксировать черную точку на гомогенном светлом фоне; переводить взор с точки на точку по углам квадрата и по диагонали; следить за круговым вращением черной точки. Расстояние между диагональными точками 14°, между вертикальными и горизонтальными — 10°, радиус вращения точки — 5°. Размер черной точки 0,5°.
Задача 2 — выполнять наклоны головы попеременно к правому и левому плечу с постоянной амплитудой порядка ±10°. Инструкция требовала постепенно увеличивать темп наклона головы от очень медленного (0,3 Гц) до максимально быстрого (1,0–1,2 Гц). Темп наклона задавался внешним звуковым источником. Испытуемые выполняли по две попытки, которые различались только типом зрительной обратной связи. В первом случае испытуемые фиксировали решетку из неподвижных относительно окружающей обстановки черных вертикальных линий длиной 20° на белом круглом фоне размером 50°; во втором тот же стимул был укреплен на ось гониометрической системы, удерживаемой испытуемым с помощью зубного слепка и поворачивающейся вместе с головой. Таким образом, во время наклонов головы на глаз испытуемого либо поступала отрицательная обратная связь по ориентации, либо такая обратная связь отсутствовала (стабилизация).
Серия натурных экспериментов. Эксперименты проводились во внутренней (закрытой) части плавучего стенда, т. е. визуальные ориентиры окружающей обстановки совпадали с ориентацией самого стенда. Создавались условия, когда стенд раскачивался из стороны в сторону либо без постоянной составляющей бокового крена (симметрично относительно гравитационной вертикали), либо в условиях постоянного крена. Испытуемые были зафиксированы ремнем в кресле с хорошей боковой поддержкой и должны были, глядя вперед на дисплей, либо совершать активные покачивания головой из стороны в сторону, либо удерживать голову в статичном положении путем напряжения шейных мышц (пассивные наклоны головы вместе с туловищем), либо расслабить шейные мышцы, позволяя голове покачиваться под воздействием инерционных сил (непроизвольные наклоны головы).
Испытуемые
В лабораторных экспериментах приняли участие 4 испытуемых, в экспериментах на плавучем стенде — 5 испытуемых (все здоровые мужчины в возрасте от 29 до 40 лет). Регистрация и анализ полученных данных
Электрические аналоговые сигналы от ТДГ, ротационных движений головы и боковые крены стенда регистрировались на многоканальный магнитограф для последующего анализа. Обработку полученных записей вели в офф-лайновом режиме средствами аналоговой и цифровой вычислительной техники. Основной интерес представляли для нас амплитудные, частотные и временные характеристики координированной моторной активности человека в условиях гравитоинерционных воздействий.
Результаты
Голова и туловище неподвижны
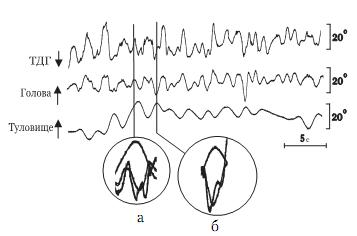
На рис. 4, а видно, что спонтанные флюктуации ТДГ в условиях фиксации точки имеют характер нистагма с частотой 0,5–1 Гц и амплитудой 1,5–2°. Скорость медленной фазы нистагма (дрейф) находится в диапазоне 1–5°/с, а скорость быстрой фазы (скачки) оценена примерно в 20–40°/с при амплитуде 2°. По сравнению с обычным физиологическим фиксационным нистагмом (горизонтальная и вертикальная составляющие), его торзионная компонента имеет значительно более быстрый дрейф и более медленные скачки, а также превышает его по амплитуде. Кроме того, торзионный нистагм имеет тоническую компоненту, т. е. глаз медленно вращается с частотой 0,1–0,2 Гц и амплитудой до 4–5°.
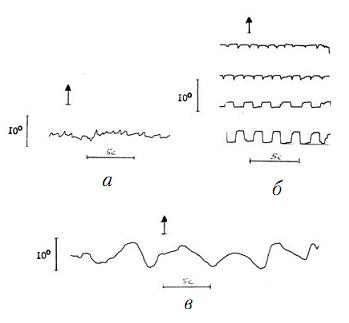
 Диагональные скачки глаза между двумя третичными позициями в орбите имели характерную форму (рис. 6, б, две верхние кривые): она напоминала «пичок» с примерно одинаковыми фронтами. Интерпретация ее такова: вместе с плоскостной саккадой происходит торзионный доворот глаза до его ориентации в первичной позиции и последующий обратный разворот, возвращающий глаз к исходной ориентации. Такая динамика ТДГ соответствует предсказаниям закона Листинга (Ferman, Collewijn, Van den Berg, 1987a; 1987b). При перемещении взора по горизонтали на 10° между двумя вершинами квадрата в верхнем полуполе зрения зарегистрированы саккадоподобные изменения в торзии глаза амплитудой 1,5°. При таких же вертикальных перемещениях взора (назальное полуполе зрения для регистрируемого поля) амплитуда торзионных саккад была выше и составляла около 4° (соответственно третья и четвертая кривые на рис. 6, б). Это больше, чем предсказывает закон Листинга, и требует дальнейшего исследования.
Диагональные скачки глаза между двумя третичными позициями в орбите имели характерную форму (рис. 6, б, две верхние кривые): она напоминала «пичок» с примерно одинаковыми фронтами. Интерпретация ее такова: вместе с плоскостной саккадой происходит торзионный доворот глаза до его ориентации в первичной позиции и последующий обратный разворот, возвращающий глаз к исходной ориентации. Такая динамика ТДГ соответствует предсказаниям закона Листинга (Ferman, Collewijn, Van den Berg, 1987a; 1987b). При перемещении взора по горизонтали на 10° между двумя вершинами квадрата в верхнем полуполе зрения зарегистрированы саккадоподобные изменения в торзии глаза амплитудой 1,5°. При таких же вертикальных перемещениях взора (назальное полуполе зрения для регистрируемого поля) амплитуда торзионных саккад была выше и составляла около 4° (соответственно третья и четвертая кривые на рис. 6, б). Это больше, чем предсказывает закон Листинга, и требует дальнейшего исследования.
При слежении за плавно движущейся точкой глаза совершали плавные торзионные колебания с удвоенной частотой вращения цели (рис. 6, в). Амплитуда таких ТДГ составляла 6–8°, а скорость их не превышала 10°/с. Плавные ТДГ сочетались с микросаккадами (амплитуда до 0,5°), возникавшими с частотой приблизительно 0,5 Гц. Следует указать на довольно значительную внутри- и межиндивидуальную вариативность амплитуд плавных следящих ТДГ. Однако сам факт существования плавных ТДГ подтверждает закон Дондерса (Howard, 1982).
Активные наклоны головы, корпус неподвижен
Записи ТДГ, вызванных активными наклонами головы из стороны в сторону, показывают, что контрвращения глаз никогда не компенсируют полностью наклона головы, т. е. их коэффициент усиления (отношение между углом вращения глаз и углом наклона головы) всегда < 1 (рис. 7). Другими словами, при наклоне головы и неподвижном туловище происходит рассогласование между гравитационной вертикалью и ориентацией вертикального меридиана сетчатки. Были выявлены следующие закономерности ТДГ при активных наклонах головы.
 Противовращательный торзионный нистагм. В ответ на наклоны головы глаза совершали быстрые плавные контрвращения, нередко прерываемые кратковременными (на 200–300 мс) замедлениями, вплоть до изменения знака скорости на противоположный. Такой нистагмоидный характер ТДГ был особенно выражен при низких (0,3–0,7 Гц) частотах наклонов головы, тогда как при частоте 1,0 Гц и более ТДГ приобретали гораздо большую плавность. Сказанное относится как к условиям с отрицательной обратной зрительной связью (естественная визуальная среда), так и к условиям с нулевой зрительной обратной связью по ориентации (визуальная система отсчета поворачивается вместе с головой).
Противовращательный торзионный нистагм. В ответ на наклоны головы глаза совершали быстрые плавные контрвращения, нередко прерываемые кратковременными (на 200–300 мс) замедлениями, вплоть до изменения знака скорости на противоположный. Такой нистагмоидный характер ТДГ был особенно выражен при низких (0,3–0,7 Гц) частотах наклонов головы, тогда как при частоте 1,0 Гц и более ТДГ приобретали гораздо большую плавность. Сказанное относится как к условиям с отрицательной обратной зрительной связью (естественная визуальная среда), так и к условиям с нулевой зрительной обратной связью по ориентации (визуальная система отсчета поворачивается вместе с головой).
Коэффициент усиления ТДГ. Показано (рис. 8, вверху), что при наличии зрительной обратной связи коэффициент усиления ТДГ возрастает от 0,19 до 0,38 с увеличением частоты наклонов головы от 0,3 до 1,1 Гц. В отсутствии зрительной обратной связи по ориентации коэффициент усиления ТДГ практически не увеличивался с частотой наклонов головы, оставаясь на уровне 0,15—0,2. Следует отметить, что разброс показателей коэффициента усиления для разных испытуемых был довольно велик, достигая 0,2. Внутрииндивидуальная же вариативность коэффициента усиления не превышала 0,1 при фиксированной частоте и амплитуде наклонов головы.
Фазовая задержка ТДГ (рис. 8, внизу) показала следующую зависимость: при
ритмических наклонах головы из стороны в сторону с амплитудой ±10–15° торзионные противовращения следовали практически без запаздывания при медленных частотах наклона, а при максимально быстрых — даже с опережением. Эта тенденция выражена чуть сильнее при стабилизации визуальной системы отсчета, по сравнению с естественными условиями.
Пассивные наклоны туловища, активные наклоны головы
 Рис. 9 демонстрирует общую динамику координированной двигательной активности туловища, головы и ТДГ при боковой качке с периодичностью 0,3–0,5 Гц и активных наклонах головы. Статичная составляющая крена не превышала 5°. Видно, что активные наклоны головы, несмотря на их произвольный характер, по большей части синхронизированы с пассивными наклонами туловища и следуют либо в фазе с ними, либо в противофазе. ТДГ четко синхронизированы с поворотами головы и всегда направлены в противоположную сторону. Хотя покачивания туловища вносят определенную нестабильность в плавность ТДГ, коэффициент их усиления не меняется каким-то систематическим образом и составляет в среднем 0,64±19. Амплитуда ТДГ тесно связана с амплитудой наклонов головы, достигая значений ±15°.
Рис. 9 демонстрирует общую динамику координированной двигательной активности туловища, головы и ТДГ при боковой качке с периодичностью 0,3–0,5 Гц и активных наклонах головы. Статичная составляющая крена не превышала 5°. Видно, что активные наклоны головы, несмотря на их произвольный характер, по большей части синхронизированы с пассивными наклонами туловища и следуют либо в фазе с ними, либо в противофазе. ТДГ четко синхронизированы с поворотами головы и всегда направлены в противоположную сторону. Хотя покачивания туловища вносят определенную нестабильность в плавность ТДГ, коэффициент их усиления не меняется каким-то систематическим образом и составляет в среднем 0,64±19. Амплитуда ТДГ тесно связана с амплитудой наклонов головы, достигая значений ±15°.
Пассивные наклоны туловища, голова фиксирована
 Рис. 10 показывает, что испытуемые вполне были способны справиться с поставленной задачей — фиксировать голову 20° путем напряжения шейных мышц. Амплитуда боковых флюктуаций головы не превышала 2° при сохранении неизменной общей ориентации головы относительно оси туловища. Пассивные наклоны туловища для данного примера составляют 4–7°, их частота — 0,2–0,3 Гц, при том что статическая компонента наклона достигала 10°. Противовращательные ТДГ отсутствовали — на записи виден только фиксационный торзионный нистагм амплитудой до 1°. Таким образом, гравитоинерционное воздействие, связанное с пассивным наклоном головы вместе с туловищем, не вызывало торзионного вестибуло-окулярного рефлекса.
Рис. 10 показывает, что испытуемые вполне были способны справиться с поставленной задачей — фиксировать голову 20° путем напряжения шейных мышц. Амплитуда боковых флюктуаций головы не превышала 2° при сохранении неизменной общей ориентации головы относительно оси туловища. Пассивные наклоны туловища для данного примера составляют 4–7°, их частота — 0,2–0,3 Гц, при том что статическая компонента наклона достигала 10°. Противовращательные ТДГ отсутствовали — на записи виден только фиксационный торзионный нистагм амплитудой до 1°. Таким образом, гравитоинерционное воздействие, связанное с пассивным наклоном головы вместе с туловищем, не вызывало торзионного вестибуло-окулярного рефлекса.
Пассивные наклоны туловища, непроизвольные наклоны головы
В том случае когда на туловище оказывается квазипериодическое гравитоинерционное воздействие, голова в отсутствии специальной задачи фиксации совершает непроизвольные компенсационные движения. Рассмотрим две ситуации: качание туловища относительно гравитационной вертикали и качание туловища в условиях статической компоненты крена.

 Другую ситуацию иллюстрирует рис. 12. Здесь мы находим подтверждение вышеприведенному наблюдению, однако важно то, что статические отклонения туловища вправо и влево на величину до 20° не находят отражение в торзии глаза; ТДГ компенсируют наклоны головы относительно центральной оси туловища, а не относительно оси гравитации. Не наблюдалось какой-либо асимметрии ТДГ в зависимости от направления наклона туловища, что указывает на отсутствие вклада статической составляющей торзии. В среднем коэффициент усиления ТДГ составлял для данных условий 0.74±14.
Другую ситуацию иллюстрирует рис. 12. Здесь мы находим подтверждение вышеприведенному наблюдению, однако важно то, что статические отклонения туловища вправо и влево на величину до 20° не находят отражение в торзии глаза; ТДГ компенсируют наклоны головы относительно центральной оси туловища, а не относительно оси гравитации. Не наблюдалось какой-либо асимметрии ТДГ в зависимости от направления наклона туловища, что указывает на отсутствие вклада статической составляющей торзии. В среднем коэффициент усиления ТДГ составлял для данных условий 0.74±14.
Обсуждение результатов и выводы
Прежде всего, следует подчеркнуть, что в целом полученные результаты совпадают с литературными данными и частично расширяют их, доказывая тем самым высокую валидность разработанного нами фотоэлектрического метода регистрации ТДГ. Это касается, прежде всего, параметров ТДГ при поворотах в третичные орбитальные позиции, которые находились в хорошем соответствии с законами Листинга (Collewijn, Van den Berg, 1987a; b). Высокая чувствительность примененного метода позволила зарегистрировать фиксационный торзионный нистагм при неподвижной голове, что ставит данный метод по точности в один ряд с электромагнитной методикой (Ferman et. al., 1987).
Кроме того, были подтверждены и частично уточнены литературные данные о кинематических характеристиках противовращательных ТДГ при активных наклонах головы (ср. Tweed et al., 1994; Vieville, Masse, 1987).
Принципиальные для понимания системы стабилизации взора относительно гравитационной вертикали результаты были получены в условиях, когда испытуемые подвергались квазипериодическим гравитоинерционным воздействиям. Нами установлено, что в условиях боковой качки с частотой 0,5–0,7 Гц и амплитудой до 10–15°, торзионные движения глаз компенсируют прежде всего наклоны головы относительно лонгитюдинальной оси туловища, а не суммарный вектор отклонения головы от гравитационной вертикали. Это справедливо как для активных наклонов головы, так и для условий, когда наклоны головы возникали как результат непроизвольной коррекции крена туловища. Даже когда такая коррекция была почти полной, т. е. голова оставалась относительно неподвижной в координатах внешнего пространства, ТДГ были направлены против наклонов головы в эгоцентрических координатах, и коэффициент усиления ТДГ достигал значений 0,5–0,8 у разных испытуемых. Напротив, когда голова оставалась неподвижной в эгоцентрических координатах за счет напряжения шейных мышц и пассивно раскачивалась вместе со всем телом, противовращательные ТДГ практически отсутствовали. То же имело место и при задаче рассматривания изображения на экране монитора в условиях качки. Этот факт идет вразрез с данными Крейчова с соавт. (Krejcov et al., 1971) показавшими равную эффективность наклонов всего тела и одной головы для инициации противовращательных ТДГ.
В этом контексте достойно упоминания еще одно наблюдение — отсутствие влияния статического компонента крена на величину торзии. Взятые в целом, эти факты следует рассматривать как отражение сложного взаимодействия зрительной, вестибулярной, соматосенсорной и моторной систем в процессе получения достоверной информации о пространственных координатах внешнего мира и положения в нем самого наблюдателя. Суммируя, можно сказать, что испытуемые в условиях качки игнорировали постоянную составляющую крена и оценивали направление субъективной вертикали по усредненной за несколько периодов ориентации лонгитюдной оси туловища.
Другой вывод состоит в том, что ТДГ стремятся ориентировать окулоцентрическую систему отсчета в направлении текущей ориентации туловища или, что для наших условий идентично, в направлении кабинных ориентиров вертикальности. Нам представляется, что полученные в наших экспериментах результаты также можно рассматривать как подтверждение идеи Миттельштадта (Mittelstadt, 1983), который предположил, что наряду со зрительной и вестибулярной информацией в восприятии субъективной вертикали участвует и третья составляющая, а именно, тенденция смещать субъективную вертикаль в направлении лонгитюдной оси самого субъекта.