Введение
В настоящее время интерес к искусственному интеллекту все более активно проникает в различные не только области научного знания, но и в сферу различных отраслей психологии. Так, когнитивная психология или нейропсихология уже не являются исключениями: все чаще можно встретить работы, в которых в той или иной степени затрагивается проблематика социально-психологическая, т. е. рассматриваются различные аспекты взаимодействия в социальных системах. Как отмечают некоторые исследователи, «... искусственный интеллект можно считать “крестным отцом” когнитивной науки — науки, которая бы объединила усилия и результаты целого семейства наук: когнитивной и социальной психологии, социологии общения и информатики» [Велихов, 1987, с. 197].
Сегодня в отечественной науке, в рамках Российской ассоциации искусственного интеллекта уже можно встретить ряд работ: например, по моделированию сознания В.К. Финна [Автоматическое порождение гипотез, 2009], распознаванию и классификации зрительных образов — Н.А. Ефремова [Ефремова, 2013], которые базируются на методологии когнитивного моделирования и представляют собой основание для построения нейросетевых моделей.
Особый интерес, на наш взгляд, представляет сегодня проблема создания нейросетевых моделей, которые позволяют распознавать типы взаимодействия в условиях дорожного трафика как особой, искусственно созданной социальной среды, затрагивающей интересы и степень включенности индивидов в систему отношений в качестве участников дорожного движения и перемещения [Кочетова, 2011; Кондратьев, 2012].
Необходимо заметить, что на сегодняшний день данная проблема приобретает особую остроту и актуальность, поскольку различного рода математические модели, описывающие, например, особенности перемещения в транспортных потоках, далеко не всегда направлены на моделирование процессов взаимодействия, а зачастую описывают поведение водителя на основе его стремления привести свою скорость в соответствие с некой равновесной скоростью общего потока [Кокорева, 2008]. Данные модели описывают, прежде всего, стилистические особенности поведения водителя при управлении транспортным средством, а именно, скорость передвижения, ускорение и торможение с учетом плотности транспортного потока, причем используется моделирование движения потока транспорта по однополосным и двухполосным участкам магистралей [Кокорева, 2008].
В этой связи, важно подчеркнуть, что такие модели ориентированы в большей степени на описание индивидуального поведения водителя как активного участника дорожно-транспортной среды в целом и транспортного потока — в частности. При этом процессы взаимодействия с другими участниками дорожного движения, передвигающимися в общем транспортном потоке, рассматриваются крайне редко. Другими словами, вопросы исследования стратегий взаимодействия в условиях дорожного трафика сегодня изучены явно недостаточно.
Возможно, данное обстоятельство связано с традиционными представлениями, опирающимися на идеи деятельностного подхода в психологии, где управление автомобилем определяется как «активное отношение водителя к дорожной обстановке, в котором прослеживается структура деятельности» [Петров, 2016]. Причем основное внимание уделяется изучению индивидуально-психологических характеристик, которые отрицательно сказываются на вождении [Лобанова, 2015; Петров, 2016], либо рассматриваются операциональные свойства водителей и подчеркивается экстремальный характер ситуации вождения [Поликарпова, 2017].
Однако, учитывая, что дорожный трафик представляет собой сложную социальную систему, в которую включено множество различных участников — субъектов передвижения, на наш взгляд, необходимо включить в процесс рассмотрения ряд стратегических особенностей поведения водителя, которые характеризуют его поведение в широком диапазоне взаимодействия с другими участниками транспортного потока. Это представляется особенно важным, например, при обращении к категории «опасное вождение», которое описано в постановлении № 477 Правительства Российской Федерации (от 30.05.16). Проявляется опасное вождение «... в неоднократном совершении одного или совершении нескольких следующих друг за другом действий, заключающихся: 1) в невыполнении требования уступить дорогу другому транспортному средству при перестроении; 2) в перестроении при интенсивном движении; 3) в несоблюдении дистанции и бокового интервала; 4) в резком торможении; 5) в препятствовании обгону» [В «опасном вождении», 2016].
Таким образом, опасными признаются многократные нарушения, а также учитываются как нарушения одного типа, так и разных типов, причем нарушения должны совершаться в относительно непродолжительный промежуток времени [Поликарпова, 2017]. Но принципиально важным, характеризующим опасное вождение, выступает именно социально-психологический аспект, который связан с взаимодействием с «другим транспортным средством» [Поликарпова, 2017]. Другими словами, подчеркивается важность взаимодействия участников транспортного потока, что открывает возможности для изучения стратегий поведения в трафике. В свою очередь, это обстоятельство может служить основанием для построения нейросетевых моделей как для распознавания стилистических особенностей управления транспортным средством, так и для классификации основных типов взаимодействия водителей при передвижении в условиях дорожно-транспортной среды. Далее мы постараемся описать версию модели такого взаимодействия участников дорожного трафика в контексте современных нейропсихологических исследований.
Архитектура модели
Архитектура модели основана на понятии самоорганизующейся карты (SOM) Кохонена [Kohonen, 2001]. Различные типы самоорганизующиеся карт Кохонена представляют собой алгоритм обучения без учителя для создания сохраняющих топологию отображений многомерных векторных данных в маломерные пространства карты. Необходимо подчеркнуть, что большинство SOM и их расширений могут работать только с векторизованными данными. Эта проблема была решена в работе [Tokunaga, 2009], где авторы представили обобщенную структуру SOM, называемую модульной — mn SOM, которая имеет структуру массива, состоящего из функциональных модулей. Эти модули представляют собой обучаемые нейронные сети, а не векторы, как и в обычных SOM. Такая модульная система способная выделять и классифицировать группы особенностей или функций в зависимостях входных и выходных значений, одновременно строя карту их сходства [Ефремова, 2013; Efremova, 2011].
В своей работе мы разрабатываем схожий подход и будем использовать функциональные модули; в таком случае сохраняется основное свойство SOM функциональных модулей, позволяющее построить карту сходства, которая будет определять сходные стратегические поведенческие проявления участников дорожного трафика в условиях передвижения.
Описание алгоритма
Итак, алгоритм mn SOM включает в себя четыре основных процесса [Ефремова, 2013]:
• оценочный процесс;
• соревновательный процесс;
• кооперативный процесс;
• адаптивный процесс [Ефремова, 2013].
Данный алгоритм является некоторым расширением алгоритма SOM Кохонена [Kohonen, 2001]. В первую очередь, веса определяются случайным образом на интервале [0—0,5], а далее в оценочном процессе выходы функциональных модулей рассчитываются отдельно для каждой пары векторов «входов-выходов»:
 (1).
(1).
Модуль, который минимизирует ошибку, в соревновательном процессе определяется далее как модуль-победитель, а ошибка Eki вычисляется следующим образом:
 (2),
(2),
где y определяет делаемый выход (здесь, y = 1)
 (3),
(3),где гi — позиция i-того RBF-модуля на карте, rv — позиция модуля с минимальной ошибкой, а о — параметр функции соседства.
И, наконец, в адаптивном процессе все модули последовательно обновляются по алгоритму обратного распространения ошибки:
(4)
(5)
Таким образом, (4) можно переписать так:
 (6)
(6)
Центры вычисляются следующим образом:
 (7)
(7)
и
 (8), т. е.
(8), т. е.
 (9)
(9)
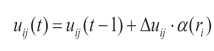
Зона IT представлена в данной работе в виде модулей, организованных в виде квадратной решетки [Ефремова, 2013]. Нейроны скрытого слоя каждого модуля представляют собой функции Гаусса; структура функционального модуля представлена на рис. 1.
Таким образом, наша модель состоит из самоорганизующейся системы Кохонена (SOM) из 256 (16x16) сетей, основанных на радиально-базисных функциях (RBF networks): 16 входных нейронов; 2 RBF-нейрона, 1 выходной нейрон. Нейроны скрытого слоя основаны на функции Гаусса.
Алгоритм распространения ошибки повторяется до тех пор, пока все отдельные модули «не обучатся», т. е. модель не станет «самообучаемой» [Fujita, 2002; Riesenhuber, 1999]. Эти четыре процесса повторяются, уменьшая окрестность функции соседства, до тех пор, пока сеть не достигнет стабильного состояния и не будет построена карта сходства особенностей взаимодействия водителей в условиях современного трафика.
Рис. 1. Структура функционального модуля
Моделирование распознавания
стратегий взаимодействия водителей
при передвижении в условиях
дорожно-транспортной среды
Как уже отмечалось выше, целью разработки модели является верификация распознавания стилистических особенностей управления транспортным средством и классификация стратегий взаимодействия в условиях дорожного трафика.
Так, нами использовались особенности управления транспортным средством, которые описывают категорию опасного вождения (см. выше).
В ходе работы нами были получены следующие стратегии взаимодействия водителей друг с другом в транспортном потоке, которые условно можно разделить на несколько групп, описанных ниже.
1. Стратегия конкуренции («блокирования» другого водителя), когда водитель автомобиля А принимает решение обгонять, а водитель автомобиля В реагирует на маневр ускорением, мешая другому завершить обгон[II] (рисунок 2.1).
2. Стратегия соревнования («улаживания» и обгона) — водитель, автомобиля А принимает решение обгонять, а водитель автомобиля В не реагирует на маневр, двигаясь в том же режиме. При этом водитель автомобиля А завершает обгон (рисунок 2.2).
3. Стратегия уклонения (отказа от соревнования и конкуренции за полосу движения), при которой водитель автомобиля А отказывается от маневра обгона и снижает скорость до скорости автомобиля В (рисунок 2.3)
4. Стратегия компромисса («уступки дороги при соревновании»), когда водитель автомобиля В видит приближающийся автомобиль и меняет траекторию движения с целью убрать «помеху» с траектории автомобиля А, но при этом сам не снижает скорости и возвращается после уступки на предыдущую полосу движения (рисунок 2.4).
5.
Стратегия активной конфронтации, суть которой состоит в том, что водитель автомобиля А принимает реше
ние обгонять, а водитель автомобиля В принимает решение «идти на конфликт» и открыто блокирует движение автомобиля А, увеличивая скорость с целью не допустить пропуска другого водителя (рисунок 2.5).
Далее смоделированные таким образом стратегии взаимодействия водителей в условиях дорожного трафика были обработаны с использованием ранее описанной нейросети. «Выход» — результат обучения — сети представляет собой карту сходства различных типов взаимодействия.
Рис. 2.1. Стратегия конкуренции
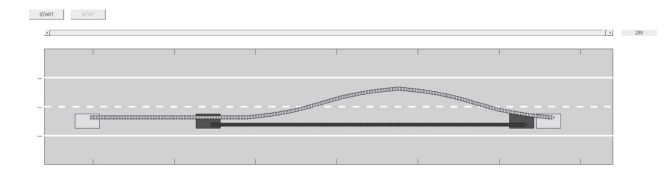 Рис. 2.2. Стратегия конкуренции
Рис. 2.2. Стратегия конкуренции
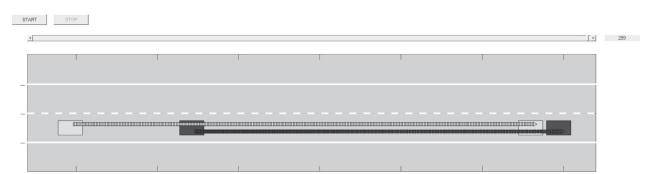
Рис. 2.3. Стратегия конкуренции
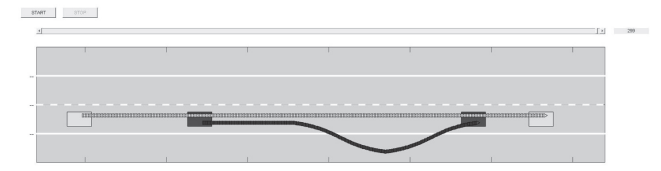
Рис. 2.4. Стратегия конкуренции

Рис. 2.5. Стратегия конкуренции
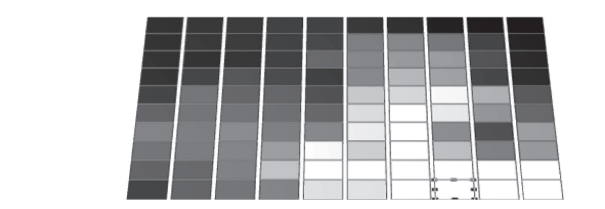
Рис. 3. Карта сходства стратегий взаимодействия в условиях дорожного трафика
Так, на рис. 3 приводится результирующая карта сходства разных поведенческих проявлений водителей, сгенерированная нейронной сетью. На ней можно видеть классификацию и выделение нескольких категорий поведенческих проявлений взаимодействия в трафике, соответствующих охарактеризованным выше типам стратегий.
На рисунке изображена карта натренированной сети. Цвет отображает уровень отклика (чем светлее, тем выше отклик) RBF-сетей, из которых состоит SOM, на информацию о траектории движения машин в процессе транзакции водителей на дороге. Анализируя получившуюся карту, мы с высокой степенью вероятности можем определить тип взаимодействия.
Таким образом, представленная нейронная сеть может служить основой для дальнейшей разработки новых, более сложных моделей, распознающих типы опасного вождения как комплекса поведенческих особенностей водителя, заключающиеся в осознанной организации препятствий для движения других транспортных средств, могущих принести урон окружающим и привести к аварии [Поликарпова, 2017].
Заключение
Можно констатировать, что предложена и реализована модель распознавания некоторых стилистических особенностей управления транспортным средством, а также последующая классификация стратегий взаимодействия водителей в условиях дорожного трафика, основанная на архитектуре самоорганизующейся карты mn SOM. Как уже говорилось выше, представленный алгоритм является модификацией обычной SOM и включает в себя обобщение — основу построения самоорганизующейся карты.
Таким образом, mn SOM не только наследует многие свойства классических самоорганизующихся карт, но и также добавляет некоторые новые оригинальные свойства [Ефремова, 2013].
Модель, основанная на данной схеме, позволяет распознавать различные поведенческие особенности взаимодействия водителей правдоподобным образом, и, более того, она не противоречит имеющимся в настоящее время данным эмпирических исследований стилевых особенностей управления транспортным средством [Лобанова, 2015].
Конечно, разработанная нами модель нейронной сети не претендует на то, чтобы считаться совершенной и, безусловно, нуждается в дальнейшей, более тщательной доработке. Однако ее можно рассматривать как определенный результат «научного синтеза» — нейронауки и социально-психологического знания, — описывающий процессы взаимодействия участников различных социальных систем.
Именно такой синтез, на наш взгляд, не только способен существенно расширить представления о человеке и его поведении в широком диапазоне социальных ситуаций, но и имеет важную практическую ценность, поскольку распознавание устойчивых поведенческих паттернов водителей может помочь в решении проблемы снижения количества дорожно-транспортных происшествий.
В целом, разработка нейросетей, распознающих особенности поведения в дорожно-транспортной среде, сможет стать существенным шагом при проектировании и создании интеллектуальных транспортных систем, призванных помогать людям и снижать уровень аварийности на дорогах.