Введение
Возможность ежедневно решать разнообразные пространственные задачи (осуществлять навигацию, ориентировку в пространстве, манипуляцию объектами) обеспечивается когнитивной системой, реализующей процессы формирования образа окружающего пространства. В поисках психологических конструктов, обеспечивающих эти процессы, было разработано понятие «пространственная репрезентация», которое определялось как мысленный (ментальный) образ, отражающий локализацию объектов и их взаимное расположение [Ruotolo, 2019]. Это понятие находится в преемственной связи с такими психологическими конструктами, как «схема» [Найсер, 1981; Bartlett, 1932], «когнитивная карта» [Sun, 2015], «фрейм» [Минский, 1979].
В литературе выделяют два типа пространственных репрезентаций: эгоцентрические пространственные репрезентации (ЭПР) и аллоцентрические пространственные репрезентации (АПР) [Klatzky, 1998]. При формировании ЭПР положение объектов кодируется относительно наблюдателя; при этом точка начала координат располагается на его теле, тогда как для АПР положение объектов кодируется друг относительно друга безотносительно позиции наблюдателя. Было высказано предположение о том, что выделенные типы репрезентаций кодируют качественно разную пространственную информацию: ЭПР — более точное представление о расположении объектов относительно наблюдателя, необходимое для выполнения действий с объектами, а АПР — обобщенное (менее детализированное и абстрактное) представление о пространстве для планирования навигации [Milner, 1995]. В силу решения разных пространственных задач процессы формирования пространственных репрезентаций настроены на разный масштаб: ЭПР — на локальный масштаб для взаимодействия с объектами в пределах вытянутой руки, а АПР — на глобальный масштаб для навигации на большие расстояния [Clark, 2018; Gupta, 2017; Milner, 2008].
Один из важных вопросов в исследованиях пространственных репрезентаций связан с точностью их формирования. С. Косслин предположил, что пространственные отношения могут быть закодированы метрическими (координатные пространственные репрезентации) или топологическими единицами (категориальные пространственные репрезентации) [Kosslyn, 1987]. Первые отражают метрические отношения между объектами в пространстве (стул находится на расстоянии 2 м относительно стола), тогда как вторые — топологические отношения (стул находится справа/слева относительно стола). Необходимость формирования пространственных репрезентаций в различных единицах, по мнению Косслина, связана с оптимизацией решения различных пространственных задач: метрические пространственные репрезентации необходимы, например, при оценке расстояний для выполнения конкретных действий, тогда как топологические пространственные репрезентации используются для запоминания и распознавания сложных пространственных сцен. Следует отметить недавние работы, в которых были предложены более детальные способы кодирования пространственных отношений для описания точности формирования пространственных репрезентаций. Так, в работах [Ruggiero, 2021; Ruotolo, 2015; Ruotolo, 2011а] при исследовании активности мозга в процессе решения пространственных задач были выявлены нейронные корреляты, отражающие как метрические, так и неметрические пространственные отношения (metric and non-metric spatial relations). Эти данные позволили выделить четыре типа пространственных репрезентаций: метрические ЭПР, метрические АПР, топологические ЭПР и топологические АПР. Эти идеи получили развитие в ряде современных исследований особенностей формирования пространственных репрезентаций [Lopez, 2020; Moraresku, 2020; Pick H.L, 1983].
Процессы формирования АПР и ЭПР имеют свои стадии роста и угасания. Так, в работах Ж. Пиаже [Piaget; Piaget, 1983; Piaget, 1966] указывается на последовательное становление в актуалгенезе сначала первичных приблизительных аллоцентрических представлений, на основе которых потом формируются более точные ЭПР, а затем и более точные АПР. Эти гипотезы подтвердились в многочисленных работах, в частности в работе [Nardini], где было показано, что у детей европейской выборки до пяти лет пространственная информация кодируется преимущественно эгоцентрически, относительно собственного тела, и позже развивается способность кодировать местоположение объектов аллоцентрически. Особенности угасания функций АПР и ЭПР были продемонстрированы в клинических исследованиях, где было показано, что в инволюционном возрасте сохраняется способность к формированию точных ЭПР при снижении способности к формированию АПР [Colombo, 2017].
Формирование пространственных репрезентаций является сложным многоуровневым когнитивным процессом, основанным на зрительном восприятии, процессах памяти, внимания и мышления. Особый интерес исследователей связан с изучением процессов формирования пространственных репрезентаций в рабочей памяти [Меньшикова, 2020; Borst, 2012; Ganis, 2011; Ekstrom, 2017]. С использованием в качестве теоретической модели мультикомпонентной модели рабочей памяти А. Бэддели [Baddeley, 2000; Baddeley, 2012; Baddeley, 1986], были проведены исследования по изучению роли различных компонентов рабочей памяти в процессах формирования ЭПР и АПР [Меньшикова, 2021; Coluccia, 2008; Coluccia, 2004; Tolman, 1932; Wen, 2013]. Их результаты позволили высказать гипотезу о важной роли визуально-пространственного блокнота рабочей памяти (ВПРП) при формировании ЭПР и АПР [McAfoose, 2009]. Предполагалось, что, в ВПРП можно выделить две системы — пространственную и визуальную, функцией которых являлась обработка соответственно пространственной и визуальной информации для решения актуальных пространственных задач [McAfoose, 2009]. В ряде работ велась дискуссия относительно того, насколько работа указанных блоков является независимой [Jiang; Oberauer, 2016; Wheeler, 2002].
Анализ работ по изучению формирования ЭПР и АПР в рабочей памяти показал, что особенности их формирования, как правило, исследовались на материале неподвижных, статических стимулов. Так, с использованием статической стимуляции изучались вопросы объема памяти [Cowan, 2010; Shooner, 2010; Yan-yan, 2013], связывания отдельных черт в более крупные единицы (чанки) [Luck, 1997; Wen, 2011], влияния глобальной пространственных конфигураций на эффективность запоминания [Blalock, 2010; Hollingworth, 2007; Jiang, 2004]. На материале статических стимулов изучались роль визуальных и пространственных компонентов ВПРП в задаче навигации [Pazzaglia, 1999], связь между эффективностью ВПРП и картографическим обучением [Coluccia, 2004], индивидуальные особенности формирования ЭПР и АПР в РП [Tolman, 1932] и другие вопросы.
Однако среда, в которой живет человек, очень динамична. Выполняя различные задачи, мы часто сталкиваемся с ситуацией, в которой необходимо запомнить расположение не статических, а движущихся объектов. Возникает вопрос о том, насколько изменяются процессы формирования ЭПР и АПР при запоминании динамических сцен по сравнению со статическими. Актуальность решения этого вопроса не вызывает сомнений, как для фундаментальной науки, так и для психологической практики.
Были проведены немногочисленные исследования по изучению хранения и переработки динамической информации в рабочей памяти. В нескольких работах изучался вопрос о кодировании информации о скорости и направлении движения объекта в рабочей памяти [McKeefry, 2007; Shepard, 1971; Zhang, 2008]. Например, в работе [McKeefry, 2007] изучалось влияние скорости движения на эффективность запоминания движущихся объектов. Было показано, что скорость движения объекта имеет решающее значение для эффективного кодирования его местонахождения. В исследовании [Sligte, 2008] изучался вопрос о влиянии движения объектов как единого целого (переработка глобальной топологической информации) на объем рабочей памяти. Показано, что кодирование движения объектов, не имеющих глобальной конфигурации (движущихся не как единое целое) приводит к снижению объема рабочей памяти, что может быть связано с нарушениями проективной инвариантности — способности к опознанию 3D объектов по 2D сетчаточным проекциям. Эти результаты продемонстрировали, что проективная инвариантность является важным фактором, влияющим на кодирование динамической конфигурации в рабочей памяти. Интересные данные были получены в работе [Wood J.N], где исследовались различия в кодировании динамических и статических сцен в рабочей памяти с точки зрения исследовательской парадигмы, объема рабочей памяти и способов хранения. Полученные результаты интерпретировались в рамках гипотез «слабого» объекта ("weak" object hypothesis) и «сильного» объекта ("strong" object hypothesis). Согласно первой, оперативными единицами в рабочей памяти являются признаки (features) объектов и их число влияет на эффективность запоминания. Согласно второй гипотезе, число объектов (а не их признаков) является фактором, ограничивающим объем рабочей памяти. Авторы показали, что при запоминании статических сцен в рабочей памяти используются оба способа кодирования пространственной информации — и глобальный (объекты), и локальный (признаки объектов). Однако при кодировании динамических сцен используется, в основном, только один способ хранения информации, соответствующий гипотезе «сильного объекта» (запоминание глобальной пространственной информации).В работе Cocchi L., et al. [Cocchi, 2007] изучался важный вопрос о том, существует ли специальный механизм кодирования динамической информации. Сравнивались особенности запоминания динамической информации в рабочей памяти на выборках нормы и больных шизофренией. Показано, что пациенты лучше запоминали последние фрагменты воспринимаемой траектории движения, тогда как контрольная группа придерживалась глобальной, целостной стратегии запоминания. Авторы предположили существование отдельного механизма в рабочей памяти, который осуществляет обработку только динамической пространственной информации, причем этот механизм работает в разном режиме для нормы и патологии. Однако эта гипотеза не подтвердилась: участники как экспериментальной, так и контрольной групп совершали аналогичные ошибки при запоминании статических и динамических сцен. Эти данные указывают на существование в рабочей памяти единого механизма обработки пространственной информации, как для статических, так и динамических сцен. В целом, анализ упомянутых выше работ показал, что накоплено еще слишком мало эмпирических данных об особенностях кодирования динамической информации в рабочей памяти, причем эти данные носят фрагментарный характер.
Целью нашего исследования являлось сравнение точности формирования ЭПР и АПР статических и динамических сцен в рабочей памяти. Мы предполагали, что запоминание сцен в динамическом режиме приведет к снижению точности кодирования как ЭПР, так и АПР. Это предположение основано на ресурсном подходе к процессам кодирования пространственной информации в рабочей памяти [May, 2018]. Под ресурсом понимается энергетический резерв, который гибко распределяется в процессе переработки информации [Гусев, 2004; Kahneman, 1973]. С точки зрения этого подхода можно ожидать снижение точности формирования ЭПР и АПР для динамических сцен по сравнению со статическими сценами, в силу появления нескольких факторов, требующих дополнительных ресурсов. Так, для запоминания динамических сцен необходимо кодировать как локальное изменение координат каждого движущегося объекта (локальная метрическая информация), так и глобальное изменение целостной конфигурации движущихся объектов (глобальная топологическая информация). К факторам, которые снижают эффективность запоминания движущихся объектов, можно отнести сокращение времени рассматривания каждого объекта, изменение визуальных признаков объектов при движении (их формы, яркости и др.), а также изменение их взаимного пространственного расположения (глобальной конфигурации). С нашей точки зрения, одной из причин, по которым наблюдается небольшое число работ, посвященных изучению формирования ЭПР и АПР динамических сцен, является отсутствие методов, позволяющих сравнить эффективность запоминания статических и динамических сцен в рамках единой экспериментальной парадигмы. Для решения этой проблемы мы модифицировали разработанную нами ранее методику оценки точности формирования ЭПР и АПР при запоминании статических сцен [Меньшикова, 2021; Меньшикова, 2018; Меньшикова, 2020; Савельева, 2017]. Идея модификации состояла в том, чтобы для одной и той же сцены создать стационарный и динамический режимы, а затем сравнить точность реконструкции ЭПР и АПР в этих режимах. Сравнение точности проходило по двум параметрам — точности идентификации, которая отражала количество правильно реконструированных объектов сцены, и точности локализации, которая отражала адекватность реконструкции пространственного положения объектов сцены. При этом точность локализации оценивалась в двух форматах: в топологических единицах, отражающих точность репрезентации общей конфигурации объектов сцены (глобальная топологическая информация), и в метрических единицах, отражающих точность репрезентации пространственных координат каждого объекта (локальная метрическая информация).
Были высказаны следующие гипотезы. В рабочей памяти при формировании ЭПР и АПР динамических сцен по сравнению со статическими:
- успешность идентификации объектов остается сохранной;
- точность локализации в метрических единицах снижается;
- точность локализации в топологических единицах остается сохранной.
Метод
Участники. В исследовании приняли участие 37 человек (23 женщины и 14 мужчин). Средний возраст участников составил (20,5±2,4) лет. Все обладали нормальным или скорректированным до нормального зрением, а также не имели нарушений вестибулярного аппарата и травм головного мозга.
Аппаратура. Для предъявления 3D сцен использовался шлем виртуальной реальности HTC Vive (рис. 1). Программное приложение было разработано в среде Unity PRO.
Стимуляция. Для изучения процессов формирования ЭПР и АПР статических и динамических сцен в рабочей памяти оценивалась успешность запоминания и реконструкции 3D сцены. Для инициации реконструкции ЭПР либо АПР использовалась процедура изменения мысленной точки обозрения сохраненной в памяти сцены.
Рис. 1. Общий вид установки
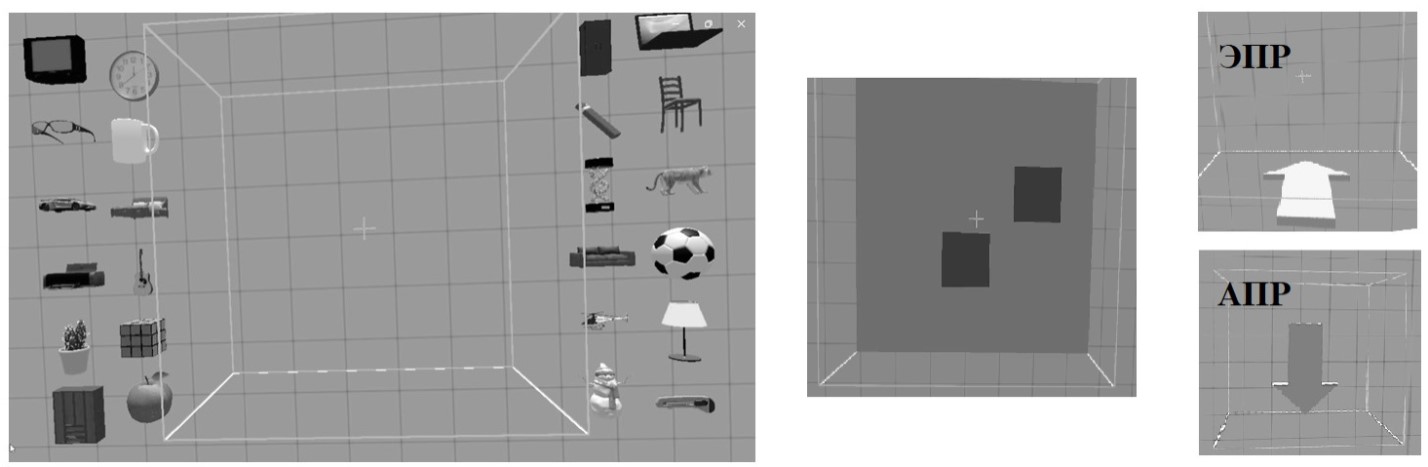
Ранее нами была разработана виртуальная среда для оценки запоминания статических сцен [Меньшикова, 2018; Савельева, 2017], которая представляла собой комнату 3×3×3м. В центральной части комнаты тонкими белыми линиями был обозначен параллелепипед, в пределах которого размещались виртуальные объекты для запоминания (рис. 2а). Он имел размеры 1×1×0,6м, висел на расстоянии 1м от испытуемого и на высоте 1,6м от пола. Его зрительный угол составлял 20×20×13°. В центре параллелепипеда находился желтый крест размером 1×1×1см. Линии параллелепипеда и крест были внесены в зрительную сцену как дополнительные зрительные признаки, задающие границы и центральную точку пространства, в котором участникам предъявлялись объекты для запоминания. Справа и слева от параллелепипеда были расположены 50 виртуальных 3D объектов (подсвечник, книга, яблоко и т.д.), которые участник использовал для реконструкции сцены. Они имели размеры 15×15×15см. Их средняя яркость варьировала незначительно в пределах 55 кд/м2. Всего было разработано 8 сцен, каждая из которых содержала 4 объекта с различной пространственной конфигурацией. Время предъявления составляло 10 секунд.
Затем, взяв за основу виртуальную среду со статическими сценами, была разработана среда с динамическими сценами. Каждая стационарная сцена перепрограммировалась в динамический режим, состоящий из двух фаз. В первой фазе (5 с) объекты предъявлялись статично, а во второй (5 с) — в динамике. Движение всех четырех объектов происходило с постоянной скоростью 72 угл. град./сек. вокруг вертикальной оси, проходящей через центр параллелепипеда. Специфика предъявления динамических сцен состояла в том, что:
- при движении объектов сохранялась глобальная пространственная конфигурация объектов — они как единое целое перемещались вокруг вертикальной оси так, что взаимные расстояния между объектами оставались неизменными;
- в момент окончания движения все объекты возвращались на те же исходные позиции, на которых находились в первой фазе предъявления.
Актуализация процессов рабочей памяти обеспечивалась введением дополнительной пространственной задачи, которая должна была решаться параллельно с основной. Она состояла в запоминании 2D сцены, представляющей собою фронтальную плоскость размером 1×1м с расположенными на ней квадратами с размерами 15×15см (рис. 2б).
а) б) в)
Рис. 2. а) параллелепипед с объектами для запоминания, библиотека предметов для реконструкции сцены; б) дополнительная сцена с квадратами; в) внешний вид стрелок, задающих точку мысленного обозрения для реконструкции сцены (вверху — для ЭПР, внизу — для АПР)
Процедура. Сценарий предъявления основной 3D-сцены и дополнительной 2D-сцены был следующим. Сначала на 500 мс предъявлялась дополнительная сцена. Задачей участника было запомнить расположение квадратов. Затем на 10с предъявлялась статическая или динамическая основная сцена. Задачей участника было запомнить объекты и их расположение. Затем на 500 мс появлялась дополнительная сцена, в которой расположение квадратов могло измениться: в половине случаев оно не изменялось, а в половине — один из квадратов смещался на 15 см в случайно выбранном направлении. Участнику нужно было нажать на кнопку контроллера, если расположение квадратов изменилось. Затем на 500 мс предъявлялась стрелка, указывающая ракурс воспроизведения сцены. Затем предъявлялась виртуальная среда, где в параллелепипеде уже не было объектов, и задачей участника было реконструировать пространственную конфигурацию объектов с учетом заданной точки мысленного обозрения. Для этого он должен был при помощи контроллера захватить из библиотеки те объекты, которые он запомнил при предъявлении основной сцены, и расставить их в нужных позициях виртуального пространства. На реконструкцию сцены давалась 1 минута.
Стрелка инициировала формирование ЭПР или АПР в зависимости от мысленной точки обозрения ментального образа сцены. Если стрелка была направлена от участника в глубину, то он должен был реконструировать сцену из позиции, в которой он находился при предъявлении сцены (формирование ЭПР) (рис. 2в, вверху). Если же она была направленная сверху вниз, то участник должен был мысленно переместиться в положение «сверху» и из этой точки мысленного наблюдения реконструировать сцену (формирование АПР) (рис. 2в, внизу).
Фиксировались объекты, правильно идентифицированные при реконструкции сцены, а также X, Y и Z координаты объектов в пространстве при предъявлении и реконструкции статических и динамических сцен.
Обработка результатов. Данные анализировались по пробам, в которых дополнительная задача с оценкой местоположения квадратов была решена верно: исключались пробы, в которых нагрузка не влияла на процессы запоминания 3D сцен. В статическом условии были собраны данные по 120 пробам, из них в 67% проб дополнительная задача была решена правильно, а в 33% проб — с ошибкой. В динамическом условии были собраны данные по 133 пробам, из них в 66% проб дополнительная задача была решена правильно, а в 34% проб — ошибочно.
В SPSS Statistics version 22 рассчитывались средние значения точности формирования пространственных репрезентаций по всей выборке по двум параметрам: 1) по точности идентификации, которая рассчитывалась как вероятность правильно воспроизведенных объектов при реконструкции сцены, и 2) точности локализации, которая отражала адекватность запоминания их местоположения в пространстве. Расчет точности локализации осуществлялся в двух форматах: в топологических единицах, отражающих способность к запоминанию общей конфигурации объектов сцены, и в метрических единицах, отражающих способность запоминания пространственных координат каждого объекта. Все параметры рассчитывались в относительных единицах. Для топологических единиц оценивалось отношение исходного расстояния между объектами в задаче запоминания к расстоянию в задаче реконструкции. Когда исходная и реконструированная конфигурации совпадали, данный параметр был равен единице, при искажении структуры конфигурации его значение отклонялось от 1. Для метрических единиц точность рассчитывалась как вероятность попадания реконструированных объектов в заданную окрестность исходных координат объектов. Проведено сравнение средних точности идентификации и локализации по Т-критерию Стьюдента для данных с нормальным распределением и по U-критерию Манна—Уитни для данных, по которым не выполнялось условие нормального распределения.
Результаты
По полученным данным был проведен двухфакторный дисперсионный анализ. В качестве зависимых переменных выступали точность идентификации и точность локализации объектов (в единицах метрики и топологии), а в качестве независимых переменных — смена мысленной точки обозрения 3D сцены при реконструкции сцены (Фактор 1) и статическое/динамическое условие предъявления сцен (Фактор 2).
Используя двусторонний ANOVA было показано, что оба фактора оказали статистически значимое влияние на точность формирования ПР (F=11,187; p≤0,001**) для фактора 1 и (F=5,909; p≤0,001**) для фактора 2. Взаимодействия факторов выявлено не было.
Рассчитаны средние значения и среднеквадратичные отклонения точности идентификации и локализации процессов формирования ЭПР и АПР в РП при запоминании статических и динамических сцен (табл. 1).
Таблица 1. Средние значения и среднеквадратичные отклонения точности идентификации и локализации процессов формирования ЭПР и АПР статических и динамических сцен
|
Репрезентации |
Параметры точности репрезентаций |
Статические сцены |
Динамические сцены |
U |
Т |
р |
|
ЭПР |
Точность идентификации |
0,99 ± 0,05 |
0,97 ± 0,09 |
844,5 |
|
0,180 |
|
Точность локализации (в метрических единицах) |
0,65 ± 0,32 |
0,38 ± 0,32 |
519,5 |
|
0,001** |
|
|
Точность локализации (в топологических единицах) |
0,83 ± 0,11 |
0,79 ± 0,08 |
|
1,94 |
0,055 |
|
|
АПР |
Точность идентификации |
0,98 ± 0,07 |
0,95 ± 0,10 |
727,5 |
|
0,692 |
|
Точность локализации (в метрических единицах) |
0,36 ± 0,31 |
0,21 ± 0,28 |
608 |
|
0,023* |
|
|
Точность локализации (в топологических единицах) |
0,77 ± 0,09 |
0,76 ± 0,09 |
|
0,53 |
0,595 |
Примечание: U — критерий Манна—Уитни, T — критерий Стьюдента, p — уровень статистической значимости, «*» — статистическая значимость (р=0,001—0,05), «**» — статистическая значимость (р≤0,001).
На рис. 3 и 4 представлены диаграммы, отражающие точность идентификации (рис. 3) и локализации (рис. 4) при формирования ЭПР и АПР для статических и динамических условий.
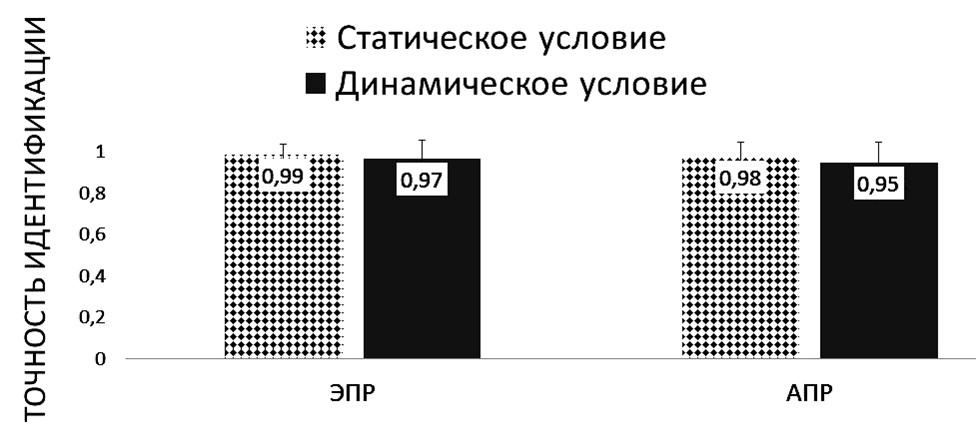
Рис. 3. Точность идентификации объектов при формировании ЭПР и АПР статических (столбики в ромбик) и динамических (черные столбики) сцен
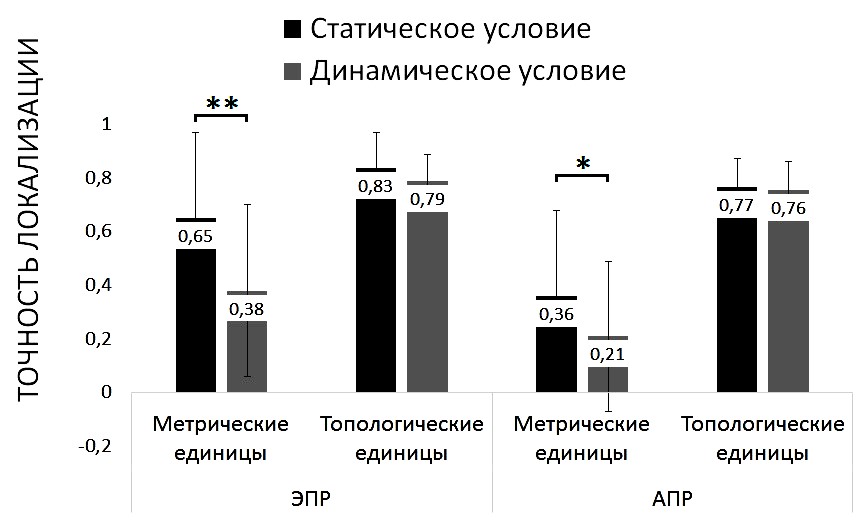
Рис. 4. Точность локализации объектов при формировании ЭПР и АПР статических (черные столбики) и динамических (серые столбики) сцен. Значения представлены в метрических и топологических единицах
Сравнение точности формирования ЭПР и АПР при переходе от статического условия предъявления сцен к динамическому показало, что:
- точность идентификации объектов осталась стабильно высокой, как при формировании ЭПР (0,99±0,05 для статики и 0,97±0,09 для динамики), так и при формировании АПР (0,98±0,07 для статики и 0,95±0,10 для динамики). Не было выявлено значимых различий между статическим и динамическими условиями для ЭПР (U=844,5; р=0,180) и АПР (U=727,5; p=0,692), по критерию Манна—Уитни;
- точность локализации в метрических единицах статистически значимо снизилась для ЭПР с (0,65±0,32) до (0,38±0,32) (U=519,5; р≤0,001**) и для АПР с (0,36±0,31) до (0,21±0,28) (U=608; р=0,023*), по критерию Манна—Уитни;
- точность локализации в топологических единицах статистически значимо не изменилась, как для ЭПР (T=1,943; df=84; p=0,055), так и для АПР (T=0,529; df=80; p=0,595), по критерию Стьюдента;
- точность локализации в метрических единицах ЭПР значимо выше по сравнению с точностью локализации АПР, как для статических (U=419,5; р≤0,001**), так и для динамических (U=645,5; р=0,005*) условий, по критерию Манна—Уитни.
Обсуждение результатов
Специфика кодирования динамических сцен проявилась в том, что некоторые показатели точности формирования АПР и ЭПР (точность идентификации объектов, а также точность локализации в топологических единицах)остались сохранными, при этом резко ухудшились показатели точности локализации в метрических единицах.
Первоначально мы предполагали, что процессы идентификации при запоминании динамических сцен могут ухудшиться, что может быть связано со снижением эффективности работы визуальной системы визуально-пространственного блокнота (ВПРП), которая отвечает за сохранение и переработку зрительных признаков объектов. Например, изменение визуальных признаков объектов (их формы, яркости и др.) при движении, а также уменьшение времени их наблюдения могло проявиться в снижении числа запоминаемых объектов. В целом, любое усложнение запоминаемой информации должно приводить к снижению эффективности работы ВПРП из-за структурных и функциональных ограничений переработки информации в рабочей памяти [Cowan, 2010; Engle, 2002]. Кроме того, такие результаты свидетельствовали бы в пользу гипотезы о наличии взаимодействия между визуальной и пространственной системами в ВПРП в условиях повышенной динамической нагрузки. Однако наши результаты показали, что точность идентификации пространственных репрезентаций сохранялась на уровне четырех (изредка трех) объектов независимо от статического/динамического условия предъявления сцен для запоминания. Полученные нами результаты подтвердили независимый характер обработки информации в визуальной и пространственной системах в ВПРП при формировании ЭПР и АРП, что подтверждает результаты других авторов, полученные на разном информационном материале [Величковский, 2015; Уточкин, 2016; Baddeley, 2000; Coluccia, 2008; Pazzaglia, 1999]. В условиях повышенной нагрузки на пространственную систему эффективность визуальной системы в ВПРП при запоминании динамических сцен осталась относительно сохранной.
Сравнение точности локализации пространственных репрезентаций динамических сцен по сравнению со статическими показало существенное снижение точности кодирования метрической информации. Это говорит о том, что метрические координатные данные о точном местоположении объектов в динамических условиях сохраняются крайне плохо, в то время как топологические данные о движении целостной конфигурации объектов сохраняются достаточно эффективно. Действительно, в условиях ограничений переработки информации в рабочей памяти ресурс гипотетически лучше тратить на более значимую информацию о глобально меняющейся пространственной информации. Этот результат подчеркивает важную роль сохранения глобальной топологической информации уже на ранних стадиях обработки пространственной информации. Наши данные хорошо согласуются результатами изучения роли топологических аллоцентрических репрезентаций, описанных в работах С. Левинсона [Levinson, 1996; Levinson, 2003] и Ж. Пиаже [Piaget; Piaget, 1983; Piaget, 1966].
Полученные нами результаты продемонстрировали значимо более высокую точность локализации ЭПР по сравнению с АПР (в метрических единицах), как для статических, так и для динамических условий. Эти данные можно объяснить на основе того, что, во-первых, процессы АПР формируются на основе ЭПР, т.е. являются вторичными. Действительно, для реконструкции АПР испытуемые должны были сначала мысленно по памяти вспомнить сцену из первоначального ракурса (воссоздать ЭПР), а затем, мысленно преобразовывая ее, воспроизвести сцену из ракурса «сверху». Вторичность воспроизведения могла повлиять на точность локализации объектов. Во-вторых, процессы формирования АПР являются существенно более сложными в том смысле, что они требуют проведения более сложных мыслительных пространственных преобразований. Это может проявиться в том, что АПР будут формироваться более схематично и абстрактно по сравнению с ЭПР, что, в свою очередь, отразится на точности локализации. Эти результаты хорошо соотносятся с результатами исследований [Ruotolo, 2011; Ruotolo, 2016], в которых изучалось восприятие, запоминание и двигательные манипуляции с 2D-отрезками разной длины, предъявляемыми на экране монитора. Было показано, что выполнение двигательной задачи (построение движения, манипуляция с объектами) опирается на метрические ЭПР, которые формируются точнее, чем метрические АПР. Мы подтвердили эти данные в наших экспериментах на материале манипуляции с 3D-объектами в виртуальном 3D-пространстве.
Следует отметить, что, несмотря на сниженные показатели точности локализации в метрических единицах, более абстрактные АПР успешно формировались в ВПРП (по точности идентификации и локализации в топологических единицах). Это означает, что хранилище ВПРП не только формируется на основе сенсорной информации, но и включает обработку мультимодальной и абстрактной информации [Величковский, 2015; Baddeley, 1986].
Суммируя полученные результаты, можно говорить о том, что оба типа ЭПР и АПР, как статических, так и динамических сцен, формируются на самых ранних этапах переработки информации в рабочей памяти.
Выводы
Полученные нами данные позволяют сделать несколько общих выводов.
Точность идентификации объектов при формировании эгоцентрических и аллоцентрических пространственных репрезентаций одинакова в статическом и динамическом условиях.
Процессы кодирования метрической локальной информации при формировании обоих типов репрезентаций динамических сцен ухудшаются по сравнению со статическими. При этом точность кодирования топологической глобальной информации остается стабильной по сравнению со статическим условием.
На основе эмпирических данных можно говорить о независимой работе визуальной и пространственной систем в составе общей когнитивной системы, обрабатывающей данные о пространственных репрезентациях в условиях лимитированного времени процессов рабочей памяти, а также о перераспределении ее ресурсных характеристик в динамических условиях в пользу поддержки топологических данных о целостной конфигурации движущихся объектов в ущерб метрическим данным.
Перспектива дальнейших междисциплинарных исследований лежит в области пересечения медицины, психологии и когнитивных наук для развития фундаментальных знаний о процессах пространственного познания. Данные о точности формирования ЭПР и АПР статических и динамических сцен при решении различных пространственных задач важны для уточнения работы системы «GPS мозга», для моделирования систем искусственного интеллекта, кодирующих пространственные свойства среды в соответствии с процессами обработки информации в рабочей памяти человека, для разработки носимых или вживленных технических устройств, созданных для оптимизации когнитивных функций (памяти, внимания, когнитивного контроля) при решении повседневных задач.