В статье излагается методический подход к нелинейной фильтрации многомерных негауссовых случайных процессов, наблюдаемых в непрерывных стохастических динамических системах с фиксированной структурой. Высокая точность разработанных алгоритмов оптимальной нелинейной фильтрации обусловлена за счет итерационного учета в них высших апостериорных центральных моментов фильтруемого процесса в общем случае произвольного порядка. Адаптивность разработанных алгоритмов высокоточной нелинейной фильтрации обеспечивается путем расчета на ЭВМ в реальном времени апостериорных асимметрий и апостериорных эксцессов всех фазовых координат фильтруемого случайного процесса, последующего их сравнения с пороговыми значениями, соответствующими гауссовому процессу, и, при необходимости, путем итерационного учета в алгоритмах фильтрации высших апостериорных центральных моментов фильтруемого процесса. Кроме того, рассмотрено современное направление в теории оптимальной нелинейной фильтрации: применение последовательных методов Монте-Карло.
ВВЕДЕНИЕ
Методы и алгоритмы оптимальной фильтрации случайных процессов (СП) применяются во многих прикладных задачах, например задачах приема радиосигналов на фоне помех, при управлении движущимися объектами: космическими аппаратами, воздушными и морскими судами, подводными аппаратами, наземными средствами передвижения в условиях неточных измерений параметров движения, при обработке телеметрической информации, информации с навигационных спутниковых систем или автономных систем позиционирования, задачах радиолокации, задачах параметрической идентификации и распознавания образов [Ярлыкова, 2004; Степанов, 2017; Bar-Shalom, 2001]. Разработка новых эффективных методов и алгоритмов, позволяющих решать задачи оптимальной фильтрации для нелинейных стохастических систем, не теряет своей актуальности.
Математическое описание в перечисленных выше и многих других задачах можно рассматривать в классе нестационарных нелинейных непрерывных стохастических динамических систем с фиксированной структурой (ДСФС).
В настоящее время для оценивания СП наиболее широко используется теория кал- мановской фильтрации (КФ), которая позволяет получить замкнутые алгоритмы оценивания [2; 8; 14-16; 18]. Однако теория КФ эффективно работает только при гауссовой или близкой к ней плотности распределения вероятностей (ПРВ) фильтруемого СП и линейном канале наблюдения, но достаточно часто ПРВ фильтруемого СП не является гауссовой. В современной теории оптимальной нелинейной фильтрации негауссовых СП используются приближенные методы, основанные на параметрической или функциональной аппроксимации апостериорной ПРВ, либо методы Монте-Карло.
К методам параметрической аппроксимации относятся: моментный, квазимомент- ный, кумулянтный (семиинвариантный), моментно-семиинвариантный методы [1-5; 8; 14; 15]. Суть методов параметрической аппроксимации заключается в получении системы стохастических дифференциальных уравнений (СДУ) первого порядка для определения числовых характеристик апостериорной ПРВ: начальных или центральных моментов, кумулянтов (семиинвариантов) или квазимоментов.
К методам функциональной аппроксимации негауссовой ПРВ относятся [1-5; 8; 11; 14; 15]: метод аппроксимации ПРВ отрезком ряда Грама-Шарлье, Эджворта или Лагерра; метод полигауссовой аппроксимации ПРВ, заключающийся в ее более точной аппроксимации суммой гауссовых ПРВ; метод эллипсоидальной аппроксимации и спектральный метод. Каждый из указанных методов имеет свои достоинства и недостатки.
В качестве альтернативы методам параметрической и функциональной аппроксимации негауссовой апостериорной ПРВ можно рассматривать несколько подходов. Один из них - метод условно-оптимальной фильтрации В.С. Пугачева [Синицын, 2006], в котором не используются процедуры нахождения апостериорной ПРВ фильтруемого СП, а формируется структура оптимального фильтра определенного порядка, выбор которого осуществляется на основе компромисса между точностью и возможностью реализации в реальном масштабе времени. Развитием метода условно-оптимальной фильтрации является непараметрический синтез непрерывного фильтра оптимальной структуры [Руденко, 1989; Руденко, 2018]. Другой подход - использование последовательных методов Монте-Карло. Фильтры такого типа в настоящее время достаточно популярны. Они называются фильтрами частиц [Bain, 2009] и основаны на моделировании СП с последующей статистической обработкой результатов.
В этой статье излагается методика адаптивной нелинейной фильтрации многомерных негауссовых СП, наблюдаемых в стохастических ДСФС, базирующаяся на комплексном использовании методов параметрической и функциональной аппроксимации негауссовой апостериорной ПРВ, а также один из возможных вариантов фильтров частиц.
1. ПОСТАНОВКА ЗАДАЧИ НЕЛИНЕЙНОЙ ФИЛЬТРАЦИИ СЛУЧАЙНЫХ ПРОЦЕССОВ В СТОХАСТИЧЕСКИХ СИСТЕМАХ С ФИКСИРОВАННОЙ СТРУКТУРОЙ
Проведенные исследования показали, что при решении задачи высокоточной нелинейной фильтрации негауссовых многомерных СП, наблюдаемых в непрерывных стохастических ДСФС, необходимо комплексно использовать как методы параметрической, так и функциональной аппроксимации апостериорной ПРВ [Косачев, 2014; Косачев, 1993], в частности: «обычный» и модифицированный моментно-семиинвариантный методы, разработанные М.Л. Дашевским, А.Г. Кашкаровой и В.И. Шином [Дашевский, 1975; Кашкарова, 1986]; методы аппроксимации апостериорной ПРВ отрезком ряда Эджворта или Лагерра.
Данные методы позволяют интегрировать более простые дифференциальные уравнения для апостериорных центральных моментов фильтруемого СП, а выбор максимального порядка учитываемых апостериорных центральных моментов производится путем расчета по формулам связи апостериорных кумулянтов (семиинвариантов) фильтруемого СП с последующим приравниванием нулю нормированных к дисперсии кумулянтов высших порядков, значения которых равны или меньше заданных пороговых значений (например, 2-5% от значения апостериорных дисперсий, которые характеризуют точность фильтрации).
Для решения задачи нелинейной фильтрации СП в стохастических ДСФС можно применять последовательные методы Монте-Карло, а именно алгоритмы непрерывных фильтров частиц [Рыбаков, 2017; Рыбаков, 2018]. В их основе лежит моделирование траекторий стохастической ДСФС согласно системе нелинейных СДУ (1). Каждой траектории ставится в соответствие весовая функция, значения которой вычисляются на основе измерений (2). Получение оценок фильтруемого СП осуществляется с помощью статистической обработки результатов моделирования: нахождение по траекториям среднего, моды либо медианы в зависимости от заданного критерия оптимальности согласно (3)-(5) с учетом весовой функции. С развитием вычислительной техники методы Монте-Карло для фильтрации СП можно применять в реальном масштабе времени для достаточно сложных стохастических ДСФС [Рыбаков, 2018].
Далее опишем основные этапы в рассматриваемых подходах к решению задачи нелинейной фильтрации.
2. ФИЛЬТРАЦИЯ НЕГАУССОВЫХ СЛУЧАЙНЫХ ПРОЦЕССОВ В СТОХАСТИЧЕСКИХ СИСТЕМАХ С ФИКСИРОВАННОЙ СТРУКТУРОЙ
3. ПРИМЕНЕНИЕ ПОСЛЕДОВАТЕЛЬНЫХ МЕТОДОВ МОНТЕ-КАРЛО (ФИЛЬТР ЧАСТИЦ)
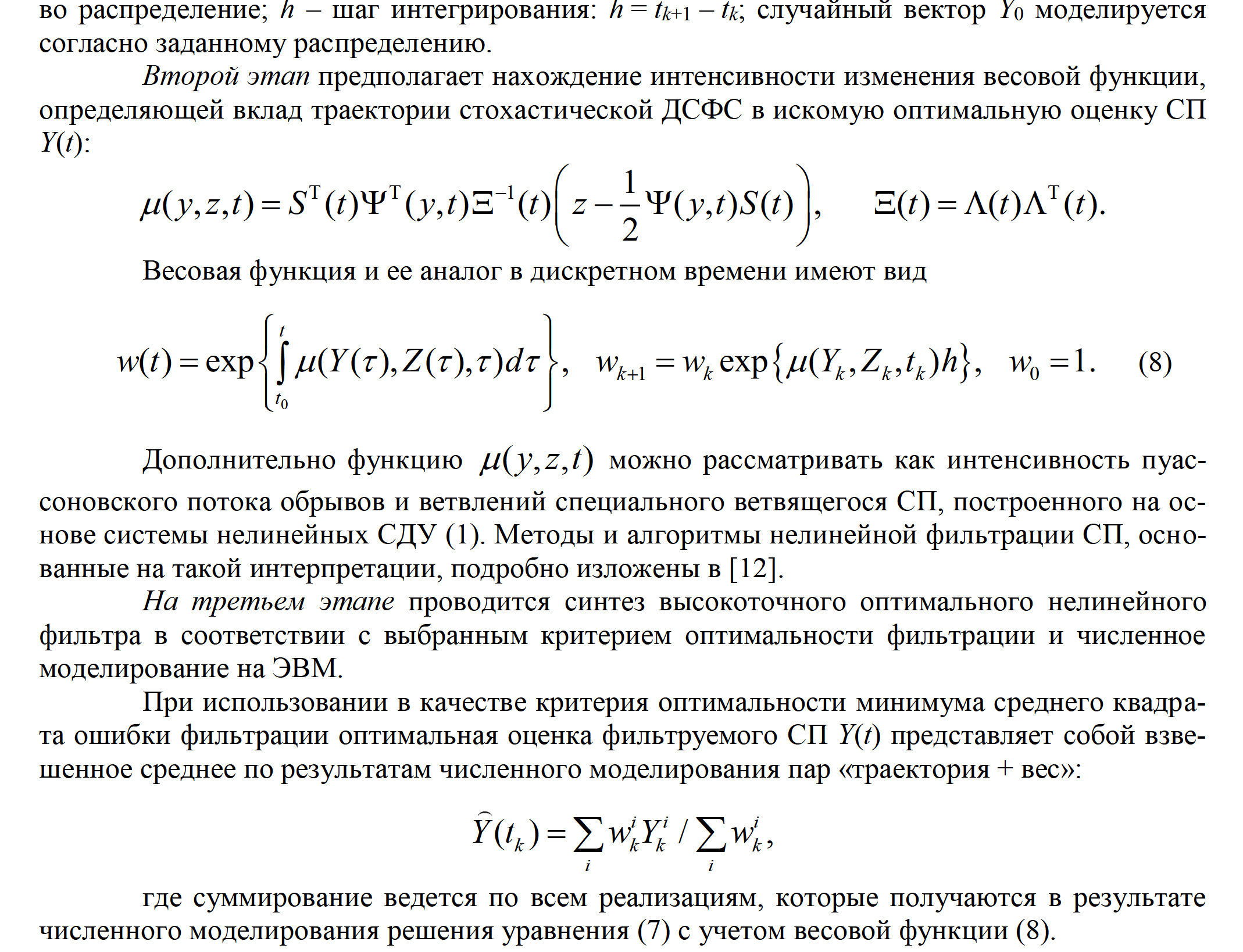
При использовании в качестве критерия оптимальности максимума апостериорной ПРВ оптимальная оценка представляет собой вектор, на котором достигается максимум оценки апостериорной ПРВ, полученной на основе численного моделирования пар «траектория + вес». Для уменьшения вычислительных затрат можно находить эту оценку приближенно для p-й фазовой координаты СП Y(t) на основе формулы (6) и взвешенных оценок центральных моментов третьего и четвертого порядков.
Финансирование
Работа выполнена при частичной поддержке гранта РФФИ № 17-08-00530.