Введение
Дискретный принцип максимума часто используется для решения задач оптимального управления дискретными системами в качестве необходимых, а иногда и достаточных условий оптимальности процесса. В частности, для линейных систем он является необходимым и достаточным условием [2, 11]. Принцип максимума испытывает сложности при рассмотрении вырожденных задач, то есть тех, для которых оптимальное значение достигается во внутренней точке множества достижимости [Пропой, 1973], это приводит к вырождению траектории сопряженной системы и, как следствие, к невозможности вычислить оптимальное управление из его соотношений. Одной из таких задач является задача быстродействия, которая характеризуется дискретным критерием качества, то есть числом шагов, необходимым для перевода системы в начало координат, которое не может быть вычислено из дискретного принципа максимума.
Среди актуальных исследований на тему решения задачи быстродействия для линейных дискретных систем можно выделить следующие работы.
В [Abdelhak, 2010] рассматривается смешанный функционал, включающий в том числе и время, но за счет второго слагаемого в функционале не происходит вырождения. В [Bako, 2011] предложен подход к решению задачи быстродействия, основанный на разреженной оптимизации множества состояний, то есть минимизации количества ненулевых элементов из множества состояний. В [Discrete-Time System Optimal, 2018] решается задача управления путем дискретизации по Годунову дифференциального уравнения в частных производных Лайтхилла–Уильямса–Ричардса. С использованием метода дискретных сопряжений результирующая нелинейная задача оптимального управления сводится к системе градиентных вычислений.
Если время вычислено и зафиксировано, то задача обладает вырожденностью с точки зрения построения сопряженной траектории. Поэтому оказывается актуальным исследование различных подходов к регуляризации принципа максимума. В частности, в работе [9, 6] одним из таких методов регуляризации является сужение множества допустимых значений управлений для того, чтобы терминальное состояние оптимальной траектории находилось в граничной точке множества достижимости. Это приводит к возможности составить конструктивные соотношения принципа максимума, из которых может быть построен процесс. Сложностью такого подхода является численное разрешение полученных условий.
В работах [7, 8] рассматривается задача сведения соотношений регуляризованного принципа максимума к системе алгебраических уравнений для суперэллипсоидальной структуры множества допустимых значений управлений при помощи аппроксимационных методов. Суперэллипсы в качестве аппроксимирующих множеств обладают большим числом степеней свободы, чем эллипсы. Хотя существует ряд приложений данного класса множеств в прикладных и теоретических задачах [13, 15, 17], их аппарат на данный момент является плохо исследованным. Данная работа продолжает результаты [7, 8], расширяя возможности суперэллипсоидальных аппроксимаций за счет выбора центра множества в приложении к решению задачи быстродействия.
Обозначения
Будем полагать, что фазовое пространство является евклидовым пространством со скалярным произведением, определяемым соотношением
Для произвольного введем на норму
При норма оказывается согласованной со скалярным произведением. Значение с точки зрения теории является допустимым, но в рамках данной статьи рассматриваться не будет, что позволяет определить число как двойственное по Гельдеру числу :
Для произвольных множеств и матрицы через будем обозначать сумму по Минковскому [12, §3 гл. I]
а через – образ множества при воздействии на него отображения
Через и обозначим множества граничных и внутренних точек соответственно. Под будем понимать коническую оболочку множества [12, §2 гл. I].
Если множество является выпуклым компактом, то для произвольной точки через обозначим нормальный конус множества в точке [12, §2 гл. I]:
Элементы нормального конуса называются векторами, опорными к в точке . Заметим, что по построению тогда и только тогда, когда . Если также верно включение , то будем называть выпуклым телом [10, раздел 3 §1 гл IV] и для произвольного введем функционал Минковского [10, раздел 3 §2 гл. III] или калибровочную функцию [12, §4 гл. I]:
Под строго выпуклым множеством будем понимать такое множество, что для любых верно включение .
Будем называть суперэллипсом или суперэллипсоидальным множеством для некоторых множество вида
Для краткости будем полагать и обозначать соответствующий суперэллипс через . Под будем полагать диагональную матрицу, построенную из вектора :
Постановка задачи
Рассматривается линейная дискретная система с ограниченным управлением :
где – вектор состояния системы, – управляющее воздействие, – матрица системы, – множество допустимых значений управлений. Предполагается, что , – выпуклый компакт, .
Для системы (2) решается задача быстродействия, т.е. требуется перевести систему из заданного начального состояния в начало координат за минимальное число шагов :
Процесс управления
, удовлетворяющий условию
, будем называть оптимальным. Предполагается, что задача быстродействия для системы
разрешима, т.е.
. Подробно вопросы разрешимости задачи быстродействия для системы (2) рассмотрены в
[Берендакова, 2023].
Построение оптимальных по быстродействию процессов сильно связано с аппаратом множеств 0-управляемости [5, 9].
Для произвольного обозначим через множество 0-управляемости системы (2) за шагов, т.е. множество тех начальных состояний, из которых систему (2) возможно перевести в 0 за шагов посредством выбора допустимых управляющих воздействий:
Тогда согласно определению также справедливо представление:
При этом управление, как продемонстрировано в [4, 6], оптимально тогда и только тогда, когда для всех верно включение
В
[Ибрагимов, 2017] получен ряд результатов для задачи быстродействия, которые можно представить в форме принципа максимума для строго выпуклого
.
Теорема 1 ([9, теоремы 1–2]). Пусть – строго выпуклое и компактное множество, , , класс множеств определяется согласно (3), процесс управления и траектория сопряженной системы удовлетворяют соотношениям
Тогда
-
1. – оптимальный по быстродействию процесс системы ;
-
2.если , то оптимальный процесс единственный;
-
3. .
С вычислительной точки зрения вопрос применения теоремы 1 сводится к определению и из условий
что в случае произвольного выпуклого тела может быть нетривиальной задачей.
В
[Ибрагимов, 2023а] представлен метод формирования субоптимального управления, основанный на использовании аппроксимации
множеством вида
. При этом в случае, когда верно равенство
, условия (5) удается свести к системе алгебраических уравнений относительно
и
. Однако эффективность данного подхода снижается в случае несимметричных относительно начала координат множеств
, поскольку точность аппроксимации, в роли которой выступает мера Лебега разности двух множеств
, может оказаться невысокой.
В этой статье предлагается усилить результаты, полученные в [Ибрагимов, 2023а], рассмотрев более общий подход к аппроксимации:
В частности, необходимо построить эквивалентную условиям (5) систему алгебраических уравнений для частного случая (6), сформулировать основные условия ее разрешимости численно, усилить существующий метод суперэллипсоидальной аппроксимации за счет выбора точки и исследовать его на оптимальность.
Сведение условий принципа максимума к системе алгебраических уравнений
Покажем, что условия (5) можно свести к эквивалентной системе алгебраических уравнений. Для этого приведем аналитическое описание множеств 0-управляемости и некоторые свойства строго выпуклых и суперэллипсоидальных множеств.
Лемма 1 [9, лемма 1]. Пусть , класс множеств определяется соотношениями (3). Тогда для любого верно представление
Лемма 2 [6, лемма 3]. Пусть – строго выпуклый компакт, . Тогда для любых различных верно
Также из [6, леммы 5, 6] вытекает следующее утверждение.
Лемма 3. Пусть – выпуклые компакты, , , , .
Тогда
-
1.
-
2.
Лемма 3 определяет преобразование нормального конуса выпуклых множеств при невырожденном линейном преобразовании и сложении по Минковскому. С учетом леммы 1 это позволяет описать произвольный нормальный конус любого множества 0-управляемости в терминах нормальных конусов множества или в случае (6). С другой стороны, лемма 2 устанавливает взаимооднозначное соответствие между опорной точкой и ее нормальным конусом для строго выпуклого множества. Если данную зависимость описать в явном виде, то можно получить алгебраические уравнения, эквивалентные условиям (5).
Введем для произвольного биективный оператор , действующий по правилу
Также введем обозначение опорной точки для выпуклого и :
Теорема 2. Пусть – строго выпуклое и компактное множество, , , класс множеств определяется согласно (3). Тогда условия (5) эквивалентны равенству
Доказательство. Поскольку , согласно определению функционала Минковского и верно включение . С учетом леммы 1 справедливо
Тогда в силу определения алгебраической суммы множеств найдутся такие , что
С учетом пункта 1 леммы 3
Таким образом
Теорема 2 полностью доказана.
Частный случай суперэллипсоидальных множеств
Рассмотрим частный случай (6), который характерен тем, что опорную точку для множества можно построить в явном виде.
Лемма 4. Пусть – строго выпуклое и компактное множество, . Тогда
1) для любого
2) для любого существует единственная опорная точка
Доказательство. Из определения нормального конуса следует пункт 1. Рассмотрим цепочку равенств
Пункт 2 доказан.
Учтем известное представление нормального конуса и опорной точки для суперэллипсоидального множества и построим их описание для случая (6).
Лемма 5 [8, лемма 5]. Пусть множество , где определяется соотношениями (1), , . Тогда
1) для любого
2) для любого существует единственная опорная точка
Следствие 1. Пусть , где определяется соотношениями (1), , . Тогда
1) для любого
2) для любого существует единственная опорная точка
Доказательство. Согласно определению нормального конуса и лемме 4 пункту 1 выполняется включение
Пункт 2 следует из пункта 2 леммы 4 и пункта 2 леммы 5:
Следствие 1 доказано.
Следствие 1 в случае (6) позволяет вычислить оптимальное управление согласно теореме 1 при выборе , а в сочетании с теоремой 2 делает возможным свести условия (5) к эквивалентным алгебраическим уравнениям.
Теорема 3. Пусть определяется согласно (6), , , . В таком случае и удовлетворяет условиям (5) тогда и только тогда, когда справедливо равенство
Доказательство. Доказательство теоремы 3 следует непосредственно при подстановке в соотношение, полученное в теореме 2, выражения для опорной точки из пункт 2 следствия 1.
Система уравнений, представленная в теореме 3, имеет не единственное решение, поскольку правая часть инвариантна к домножению вектора на любое положительное число. Для использования численных методов можно предположить модификацию данной системы, которая имеет единственное решение.
Следствие 2. Пусть определяется согласно (6), , . Тогда для любого существует единственное решение системы уравнений
которое также удовлетворяет условиям (5).
Теорема 3 и следствие 2 в совокупности с теоремой 1 позволяют полностью решить задачу быстродействия для линейной дискретной системы в случае суперэллипсоидальной структуры множества допустимых значений управлений (6). Разрешение условий (5) согласно следствию 2 эквивалентно численному решению системы алгебраических уравнений. Одновременно оптимальный процесс и траектория сопряженной системы могут быть вычислены по рекуррентным соотношениям, представленным в теореме 1. Оптимальное управление явным образом определяется пунктом 2 следствия 1.
Внутренняя суперэллипсоидальная аппроксимация выпуклого тела
Результаты [7, 8] расширены на случай, когда множество допустимых значений управлений несимметрично. Имеет смысл рассмотреть сдвиг множества для лучшей аппроксимации, то есть подобрать центр аппроксимирующего множества.
Рассмотрим два различных способа нахождения – центр масс и Чебышевский центр . Так же в работе рассмотрен случай центра суперэллипса в начале координат .
Центром масс называется геометрическая точка, положение которой определяется распределением массы в теле [4, §10 гл. IV]. Он может быть вычислен путем численного интегрирования:
где
Чебышевский центр ограниченного выпуклого множества является центром описанного шара минимального радиуса [Гаркави, 1964]. Для случая, когда множество допустимых значений управлений является многогранником, Чебышевский центр является решением следующей задачи оптимизации
После определения центра суперэллипсоидального множества и его сдвига, задача сводится к уже рассмотренному в [7, 8].
Рассмотрим примеры субоптимального решения задачи быстродействия с помощью суперэллипсоидальной аппроксимации для нескольких различных систем, где множество является выпуклым несимметричным многогранником. В каждом примере рассматриваются 3 случая – множество с центром в начале координат, со сдвигом на центр масс и со сдвигом на Чебышевский центр.
Пример 1. Для системы с исходными параметрами
вычислены центры суперэллипса: центр масс и Чебышевский центр .
Для 3 случаев центра суперэллипса определены тензоры инерции и вычислены матрицы ориентации суперэллипса:
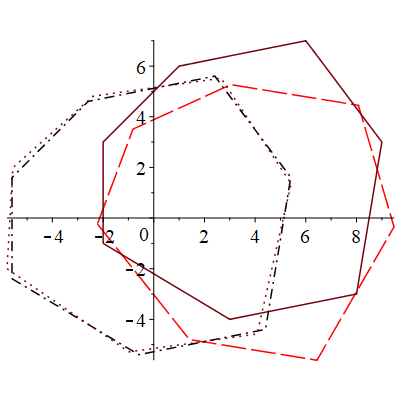
Ориентация множества при разных центрах множества отражена на рис. 1.
Рис. 1. Исходное множество (непрерывной линией), ориентированное (штриховой линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
В качестве аппроксимируемого множества рассматриваются ориентированные многогранники :
Рассматриваются следующие значения параметра :
для которых при решении оптимизационных задач были получены оптимальные значения параметров суперэллипсоидальной аппроксимации согласно [7, 8]:
Множество без сдвига:
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
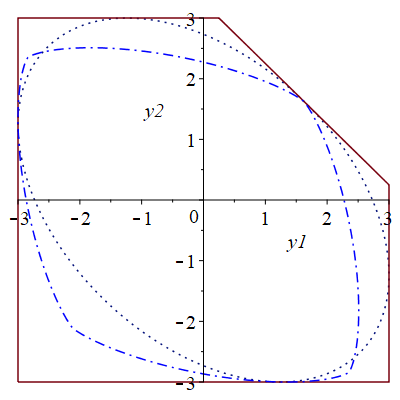
Результаты аппроксимации можно увидеть на рис. 2.
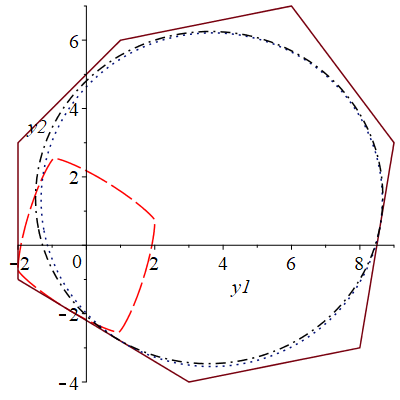
Рис. 2. Исходное множество (непрерывной линией), ориентированное (штриховой линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
По рисунку видно, что суперэллипсы со сдвигом в центр масс и Чебышевский центр имеют большую площадь по сравнению с суперэллипсом без сдвига.
В ходе решения системы алгебраических уравнений для вычисления , определенной согласно следствию 2, были получены следующие численные значения параметров:
Множество без сдвига:
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
Оптимальные траектории, построенные в соответствии с теоремой 2, представлены в табл. 1–4.
Таблица 1. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество без сдвига) (k=0…6)
|
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество без сдвига) (k=7…9)
|
|
7
|
8
|
9
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество со сдвигом на центр масс)
|
|
0
|
1
|
2
|
3
|
4
|
5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 4. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество со сдвигом на Чебышевский центр)
|
|
0
|
1
|
2
|
3
|
4
|
5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поскольку множество управлений в случаях с центром масс и с Чебышевским центром шире по сравнению со множеством без сдвига, начала координат удается достигнуть быстрее.
Пример 2. Система имеет следующие исходные данные
Вычислен центр суперэллипса – центр масс , Чебышевский центр в данном случае совпадает с началом координат .
Тензоры инерции, для которых вычисляются матрицы ориентации суперэллипса, выглядят следующим образом:
Процедура ориентации множества показана на рис. 3.
Рис. 3. Исходное множество (непрерывной линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
В качестве аппроксимируемого множества рассматриваются ориентированные многогранники :
Рассматриваются следующие значения параметра :
для которых при решении оптимизационных задач были получены оптимальные значения параметров суперэллипсоидальной аппроксимации согласно [7, 8]:
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
Результаты аппроксимации можно увидеть на рис. 4.
Рис. 4. Исходное множество (непрерывной линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
В ходе решения системы алгебраических уравнений для вычисления , определенной согласно следствию 2, были получены следующие численные значения параметров:
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
Оптимальные траектории, построенные в соответствии с теоремой 2, представлены в таблицах 5–6.
Таблица 5. Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество со сдвигом на центр масс)
|
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 6
Оптимальная траектория и оптимальное управление для линейной дискретной системы при (множество со сдвигом на Чебышевский центр)
|
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Особых отличий в траекториях нет, однако мера суперэллипса со сдвигом на центр масс больше меры суперэллипса со сдвигом на Чебышевский центр (в данном случае совпадает со множеством без сдвига).
Пример 3. В данном примере рассмотрим наибольший по мере суперэллипс и попробуем решить задачу быстродействия.
Система имеет следующие входные данные
Вычислены центры суперэллипса: центр масс и Чебышевский центр .
Для 3 случаев центра суперэллипса определены тензоры инерции и вычислены матрицы ориентации суперэллипса:
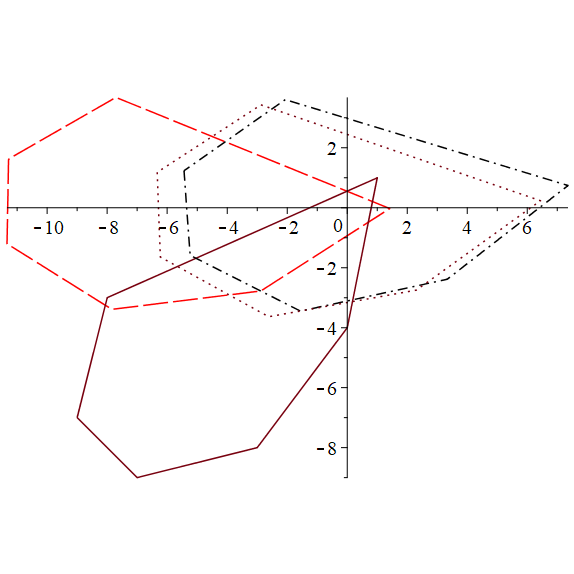
Ориентация множества при разных центрах множества отражена на рис. 5.
Рис. 5. Исходное множество (непрерывной линией), ориентированное (штриховой линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
В качестве аппроксимируемого множества рассматриваются ориентированные многогранники :
Рассматриваются следующие значения параметра :
для которых при решении оптимизационных задач были получены оптимальные значения параметров суперэллипсоидальной аппроксимации согласно [7, 8]:
Множество без сдвига:
Множество со сдвигом на центр масс:
Множество со сдвигом на Чебышевский центр:
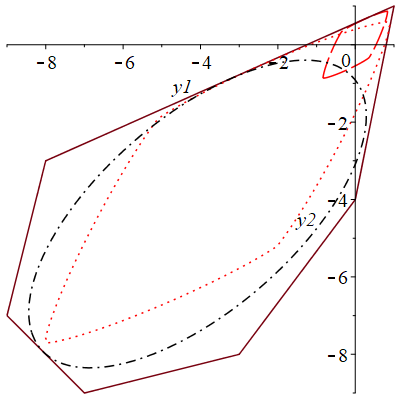
Результаты аппроксимации можно увидеть на рис. 6.
Рис. 6. Исходное множество (непрерывной линией), ориентированное (штриховой линией), ориентированное (штрихпунктирной линией), ориентированное (пунктирной линией)
По рисунку видно, что суперэллипсы со сдвигом в центр масс и Чебышевский центр имеют большую площадь по сравнению с суперэллипсом без сдвига. Однако можно заметить, что суперэллипс со сдвигом на центр масс, имеющий наибольшую меру, не включает начало координат, соответственно нарушается условие , решение задачи быстродействия не может быть вычислено.
Заключение
В разделе 2 введены обозначения для дальнейшей работы. В разделе 3 описана постановка задачи быстродействия и задачи аппроксимации. В разделе 4 рассматривается приведение сложноразрешаемых условий из принципа максимума к суперэллипсоидальной структуре ограничений, которую можно разрешить аналитически. В разделе 5 представлена внутренняя суперэллипсоидальная аппроксимация выпуклого тела, в частности рассмотрен случай несимметричным множеств, для которых требуется определить центр аппроксимирующего множества. В разделе 6 приведены примеры решения задачи быстродействия на основе доказанных утверждений для разных систем со сравнением результатов для различных центров суперэллипса.
Представленные в статье методы могут применяться для численного моделирования и симуляции динамики разнообразных естественных и технических систем. За счет простоты построения оптимальных процессов на основе принципа максимума и формирования программного управления, удается не только решить задачу быстродействия для заданного начального состояния, но и собрать большой объем модельных данных и различных траекторий для дальнейшего анализа системы. В то же время, аппарат суперэллипсоидальных аппроксимаций гарантирует более высокую точность по сравнению с классическими эллипсоидальными методами аппроксимации.