Контекст и актуальность. В работе решается задача быстродействия для линейной стационарной системы с дискретным временем и суммарными ограничениями на управление первого порядка. Цель. Продемонстрировать возможность построения гарантирующего по быстродействию управления. Гипотеза. Гарантирующее решение, найденное при применении алгоритма полиэдральной аппроксимации, будет сходиться к оптимальному. Методы и материалы. Данная задача обладает рядом особенностей, которые осложняют её решение с помощью таких стандартных методов, как динамическое программирование и принцип максимума. По этой причине предлагается использовать для решения задачи быстродействия геометрический подход и аппарат множеств 0-управляемости. Результаты. Для случая, когда суммарные ограничения являются кусочно-линейными, доказано, что все множества 0-управляемости представляют собой многогранники, что позволяет свести исходную задачу управления к решению ряда задач линейного программирования. Для произвольных выпуклых суммарных ограничений показана возможность построения гарантирующего решения в смысле времени быстродействия на основе методов полиэдральной аппроксимации. Выводы. Исследована сходимость гарантирующего решения к оптимальному: доказано, что она будет выполнена за конечное число итераций, если используемый алгоритм полиэдральной аппроксимации гарантирует сходимость в смысле метрики Хаусдорфа. Разработанные теоретические результаты продемонстрированы на численном примере.
Для цитаты:Мохначева, А.А. (2025). Построение гарантирующего по быстродействию управления для дискретных систем с суммарными ограничениями на управление. Моделирование и анализ данных,15(2), 70–88. https://doi.org/10.17759/mda.2025150204
Первое упоминание задачи быстродействия относится к этапу формирования математической теории оптимального управления как научной дисциплины. Во многом это связано с естественным функционалом качества – временем, необходимым для перевода системы из заданного начального состояния в начало координат. Для случая систем с непрерывным временем решение может быть получено при помощи стандартных подходов, таких как принцип максимума (Понтрягин и др., 1969) или метод динамического программирования (Беллман, 1960). Однако для систем с дискретным временем общего подхода к решению задачи быстродействия выработано не было. Это связано с нерегулярностью экстремума почти для всех начальных состояний и дискретным функционалом качества, что отмечено как в классических монографиях (Болтянский, 1973), (Пропой, 1973), так и в современных работах (Ибрагимов, 2019).
Известные результаты, посвященные задаче быстродействия для систем с дискретным временем, представлены крайне небольшим набором статей и в основном исследуют различные частные постановки. В работе Мороза А.И. (Мороз, 1965) обсуждаются только трехмерные системы со скалярным управлением, Desoer C.A., Wing J., Lin W.-S. (Desoer, Wing, 1961), (Lin, 1986) рассматривают уже системы произвольной размерности, но все еще со скалярным управлением. Bashein G., Vlieger J.H., Verbruggen H.B., Bruijn P.M. (Bashein, 1971), (Vlieger, Verbruggen, Bruijn, 1982) сосредоточены на численных методах построения оптимального управления на основе линейного программирования. В статьях Lasserre J.B., Stamnes O.N., Callafon R.A. (Lasserre, 1993), (Stamnes, Callafon, 2007) управление предполагается векторным, но исключительно с ограничениями в форме зонотопов. В свою очередь Kolev L.V. (Kolev, 1978) и Scott M. (Scott, 1986) предлагают регуляризацию задачи быстродействия при помощи введения дополнительного критерия качества. Работы Blanchini F. и Ukovich W. (Blanchini, Ukovich, 1993) допускают уже геометрические полиэдральные ограничения на управление. В (Keerthi, Gilbert, 1987) Keerthi S., Gilbert E. предполагают смешанные полиэдральные ограничения, накладываемые одновременно на управление и состояние. Данные методы, базирующиеся на средствах линейного программирования, развиваются в современных статьях (Abdelhak, Rachik, 2010), (Amato и др., 2022), (Chen, Bako, Lecoeuche, 2012), (Lee, Haddad, 2022), (Yang, Xia, Geng, 2019), (Leomanni, Costante, Ferrante, 2022), (Бортаковский, 2023).
Обобщением выше приведенных результатов может считаться геометрический подход к решению задачи быстродействия, использующий аппарат множеств 0-управляемости и достижимости (Ибрагимов, 2019), (Ибрагимов, Новожилкин, Порцева, 2021). Описание в терминах данных множеств функции Беллмана позволяет сформулировать конструктивные достаточные условия оптимальности управления. В частности, в случае линейных ограничений на управление, множества 0-управляемости являются многогранниками, а метод динамического программирования сводится к ряду задач линейного программирования (Мороз 1965), (Lin, 1986), (Bashein, 1971), (Vlieger, Verbruggen, Bruijn, 1982), (Lasserre, 1993), (Stamnes, Callafon, 2007). Для систем, обладающих произвольными выпуклыми ограничениями, на основе алгоритмов полиэдральной аппроксимации (Каменев, 2010) возможно получить гарантирующее решение аналогичным образом. В (Ибрагимов, Новожилкин, Порцева, 2021) исследована сходимость гарантирующего решения к оптимальному.
Тем не менее, все приведенные выше результаты относятся к системам с геометрическими ограничениями на управление, которыми на практике моделируются предельно допустимые по амплитуде значения управляющих воздействий. В данной статье предлагается обобщение развитого в (Ибрагимов, Новожилкин, Порцева, 2021) подхода на случай систем с дискретным временем и суммарными ограничениями на управление. Посредством такого типа ограничений могут быть описаны суммарные запасы ресурса, расходуемого на управление. Например, общий объем топлива в задаче наискорейшей коррекции орбиты космического аппарата. В частности, в статье исследовано при каких условиях для такого класса систем множества 0-управляемости будут являться многогранниками, получено их описание в общем виде. Основной целью является определение условий сходимости гарантирующего решения, построенного при помощи аппроксимационных алгоритмов, к оптимальному.
2 Постановка задачи
Рассматривается линейная стационарная система с дискретным временем и суммарными ограничениями на векторное управление :
где – вектор состояния системы, – вектор управления, – матрица системы, – запас ресурса управления, – выпуклое и компактное множество, определяющее ограничение на управление. Предполагается, что и Через для и выпуклого , содержащего , обозначен функционал Минковского (Колмогоров, Фомин, 2012, разд. 3, §2, Гл. III):
Под понимается относительная внутренность множества – множество внутренних точек , если рассматривать данное множество как подмножество его аффинной оболочки (Рокафеллар, 1973, §6, Гл. II).
Для системы решается задача быстродействия, т.е. требуется перевести систему из заданного начального состояния в начало координат за минимальное число шагов . Процедура решения задачи быстродействия для дискретных систем состоит из двух этапов, первым из которых является вычисление :
Второй этап заключается в построении процесса управления , удовлетворяющего условию . Такой процесс будем называть оптимальным.
Использование функционала Минковского множества для описания ограничений на управления является целесообразным, поскольку для решения поставленной задачи используется геометрический подход, предполагающий в большей степени работу с множествами. Также далее будет продемонстрировано, что в терминах множества может быть получено более простое и конструктивное описание множеств 0-управляемости. С другой стороны, выбранный подход не снижает общности постановки задачи. Продемонстрируем данный факт на следующем примере.
Пример 1. Рассмотрим систему управления с суммарными ограничениями на управление
Данная система будет эквивалентна системе , если выбрать следующим образом:
3 Множества 0-управляемости и критерий оптимальности в случае линейных ограничений
Обозначим через класс множеств 0-управляемости системы , где представляет собой множество тех начальных состояний, из которых можно перевести систему в начало координат за шагов посредством выбора допустимого управления при суммарном ресурсе управления :
Также будем считать, что .
С учетом величину можно определить следующим образом:
В силу решение первого этапа задачи быстродействия сводится к последовательному построению множеств 0-управляемости и проверки принадлежности им начального состояния системы.
Также условие разрешимости задачи быстродействия можно свести к включению
Более подробно вопросы построения и оценивания предельных множеств 0-управляемости рассматриваются в (Ибрагимов и др., 2022).
Справедлив критерий оптимальности по быстродействию процесса управления.
Лемма 1 (Ибрагимов, 2024). Пусть класс множеств , определяется согласно . Тогда процесс управления оптимален по быстродействию для системы тогда и только тогда, когда для некоторого выполняются соотношения
Справедливо следующее представление для множеств 0-управляемости.
Теорема 1. Пусть класс множеств определяется согласно , . Тогда для любых верно представление
Доказательство. Пусть . По определению данное включение равносильно условиям
Рассмотрим первое равенство из системы. В силу того, что допустимо эквивалентное преобразование
Таким образом, включение равносильно условиям
Введем обозначения:
По определению функционала Минковского , . Верно равенство
Таким образом, при обозначениях в силу равенства эквивалентны включения
Следовательно,
Теорема 1 доказана.
В случае, когда множество является многогранником, т.е. существуют такие, что
можно получить более конструктивное описание множеств 0-управляемости.
Следствие 1. Пусть класс множеств определяется согласно , и верно Тогда для любых
1. верно представление
2. справедлива оценка для множества вершин
3. справедлива оценка для числа вершин
Доказательство. В силу теоремы и получим представление
В силу (Циглер, 2014, утв. 2.2, §2.1, Гл.2) верно включение и оценка числа вершин
Следствие 1 доказано.
На основе критерия оптимальности из леммы и результатов следствия удается построить конструктивный метод решения задачи быстродействия для системы в случае который сводится к решению ряда задач линейного программирования.
Теорема 2. (Ибрагимов, 2024, Теорема 1). Пусть в системе выполнено включение , , справедливы представления
наборы , определяются соотношениями
где на каждом шаге числа определяются из решения задачи линейного программирования
Тогда – оптимальный по быстродействию процесс.
Теорема позволяет построить оптимальное по быстродействию управление для систем вида с ограничениями первого порядка Для произвольных выпуклых множеств аналогичный подход может быть применим, если предварительно провести их полиэдральную аппроксимацию (Каменев, 2010), как это было предложено в (Ибрагимов, Новожилкин, Порцева, 2021). Однако в этом случае возникает вопрос об оптимальности результирующего процесса. Целью данной работы является разработка подхода к решению поставленной задачи при помощи методов полиэдральной аппроксимаций, а также указание условий, при которых можно добиться оптимальности гарантирующего процесса.
4 Постановка задачи об аппроксимации
При использовании аппроксимационных методов для решения задачи быстродействия справедливы следующие оценки времени быстродействия.
Лемма 2. Пусть справедливо включение где – выпуклые и компактные множества, содержащие в качестве относительно внутренней точки, задача быстродействия для разрешима для систем а величины – время быстродействия для данных систем соответственно. Тогда
Доказательство. Рассмотрим множества систем и соответствующие им величины Для согласно определению , найдутся такие , что справедливы соотношения
Используя определение и компактность проведем следующие преобразования для произвольного :
Тогда справедливо неравенство
Отсюда следует, что
Тогда для системы по определению выполнятся соотношение
Аналогично получается соотношение для случая . Лемма 2 доказана.
Задача об аппроксимации может быть сформулирована следующим образом. Пусть последовательности компактов удовлетворяют включению
Для всех величины являются оптимальными значениями критерия в задаче быстродействия для систем соответственно. Требуется определить, какими свойствами должны обладать последовательности чтобы для всех или почти для всех выполнялись соотношения
5 Предельные свойства множеств 0-управляемости
Для рассмотрения вопросов сходимости исследуемые множества будем предполагать элементами метрического пространства компактов наделенного метрикой Хаусдорфа:
Тогда справедлива следующая лемма.
Лемма 3. Пусть последовательность сходится к множеству системы
Тогда для любых множества 0-управляемости и для систем и соответственно удовлетворяют соотношению.
Доказательство. Выберем произвольные и .
По определению сходимости из следует, что для любого найдется такой, что .
В силу непрерывности оператора в пространстве компактов для всех выберем так, чтобы при для некоторого из следовало бы неравенство
Для доказательства необходимо показать, что существует номер такой, что для любого выполняется неравенство для любого .
Пусть . Тогда верны соотношения
Отсюда в силу определения расстояния Хаусдорфа следует неравенство
С учетом метода математической индукции можно перейти к более общему соотношению для любых :
Тогда из и теоремы следует, что
Лемма доказана.
На основе данной леммы и свойств метрики Хаусдорфа можно предложить следующее решение задачи об аппроксимации.
Тогда почти для всех , для которых существует такое, что
– оптимальное значение критерия в задаче быстродействия для системы .
Доказательство. Обозначим через множество 0-управляемости системы . По теореме для всех справедливо включение . Из леммы следует, что .
Для любого найдется такое, что выполняется и существует такое, что . Тогда в силу (Ибрагимов, Новожилкин, Порцева, 2021, лемма 5) . Это с учетом приводит к соотношениям
С другой стороны, согласно лемме . Тогда Теорема доказана.
Тогда для всех , для которых существует такое, что
– оптимальное значение критерия в задаче быстродействия для системы .
Доказательство. Обозначим через множество 0-управляемости системы Принадлежность означает, что существует такое, что .
По теореме для всех справедливо включение Из леммы следует, что то есть найдется такой, что .
Тогда в силу (Ибрагимов, Новожилкин, Порцева, 2021, лемма 6) Это с учетом приводит к соотношениям
С другой стороны, согласно лемме . Тогда . Теорема доказана.
Следствие 2. Пусть выполняются условия теорем и одновременно. Тогда существует такое, что
Доказательство. Следствие вытекает из теорем и , если выбрать .
Из теорем и следует, что если метод полиэдральной аппроксимации гарантирует сходимость в смысле расстояния Хаусдорфа к аппроксимируемому множеству, то почти для всех начальных состояний гарантирующее решение окажется также и оптимальным по быстродействию за конечное число итераций аппроксимационного алгоритма. Таким образом, можно считать задачу об аппроксимации решенной. Оптимальный по быстродействию процесс в системе , с одной стороны, может быть построен при помощи теоремы за счет средств исключительно линейного программирования, с другой стороны, он также является оптимальным процессом в исходной системе .
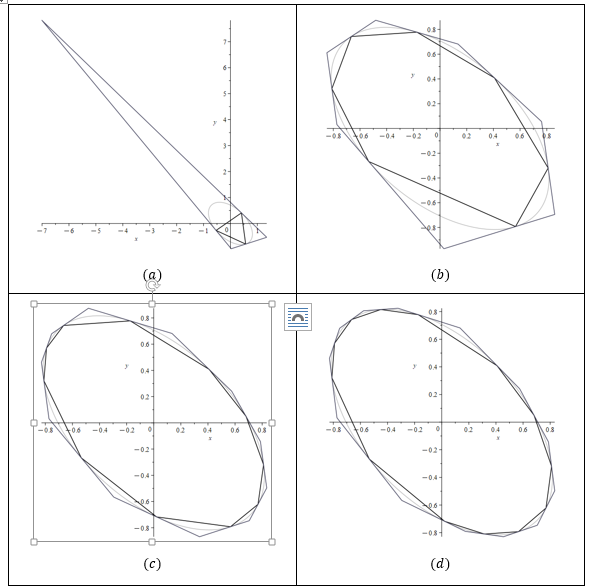
Рис.1. Аппроксимации для , , , Fig. 1. Approximation for , , , 6 Пример
Приведем пример использования теорем и . Пусть
Последовательности будут строиться с помощью метода сближающих многогранников (Каменев, 2010, §4.3, Гл.4), где – число вершин в аппроксимирующем многограннике. Результаты аппроксимаций на разных шагах алгоритма представлены на рис. 1.
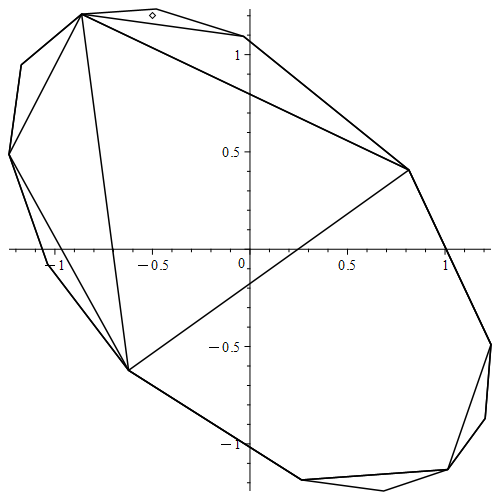
Поиск времени быстродействия осуществляется путем построения множеств 0-управляемости до тех пор, пока одно из них не начнет включать в себя начальное состояние . В качестве множества используются найденные аппроксимации . Полученные значения представлены в таблице . После -го шага алгоритма значения совпали в соответствии со следствием . Для построения оптимального процесса можно использовать . Результат сходимости алгоритма в смысле теорем и представлен на рис. , где показана принадлежность начального состояния множеству 0-управляемости за шага.
Таблица 1/ Table 1
Вычисление . Calculation .
3
4
5
6
7
8
9
10
11
12
13
4
4
4
4
4
4
4
4
4
4
4
6
6
6
6
6
5
5
5
5
5
4
Покажем сходимость метода для той же системы, но для других начальных состояний. Результат приведен в таблице . Для каждого состояния было найдено время быстродействия и соответствующее ему число вершин в аппроксимирующих многогранниках.
Таблица 2/ Table 2
Сходимость метода для различных начальных состояний. Convergence of the method for different initial states.
9
10
15
15
5
8
14
4
32
21
Рис. 2. Множества 0-управляемости за шага, построенные по внутренней аппроксимации для . Fig. 2. Null-controllable sets for steps, constructed by internal approximation for .
7 Заключение
В работе разработан метод, который позволяет на основе алгоритмов полиэдральной аппроксимации формировать оптимальное по быстродействию управление для линейных стационарных систем с дискретным временем и суммарными ограничениями на управление первого порядка за счет средств линейного программирования. Доказана сходимость гарантирующего решения к оптимальному за конечное число шагов. Описанный метод является обобщением подхода из (Ибрагимов, Новожилкин, Порцева, 2021).
Важно отметить, что в рамках данной статьи допускается использование довольно широкого класса алгоритмов полиэдральной аппроксимации. Для построения оптимального решения на основе гарантирующего достаточно выбрать алгоритм, сходящийся в метрике Хаусдорфа, что является сравнительно мягким ограничением.
В качестве направления дальнейших исследований можно предложить обобщение разработанного подхода на случай нестационарных систем или систем со смешанными геометрическими и суммарными ограничениями.
Литература
Понтрягин, Л.С., Болтянский, В.Г., Гамкрелидзе, Р.В., Мищенко, Б.Ф. (1969) Математическая теория оптимальных процессов. М.: Наука. Pontryagin, L.S., Boltyanskiy, V.G., Gamkrelidze, R.V., Mishchenko, B.F. (1969) Mathematical theory of optimal processes. Moscow: Science (In Russ.).
Беллман, Р. (1960) Динамическое программирование. М.: ИИЛ. Bellman, R. (1960) Dynamic programming. Moscow: IIL. (In Russ.).
Болтянский, В.Г. (1973) Оптимальное управление дискретными системами. М.: Наука. Boltyanskiy, V.G. (1973) Optimal control of discrete systems. Moscow: Science. (In Russ.).
Пропой, А.И. (1973) Элементы теории оптимальных дискретных процессов. М.: Наука. Propoy, A.I. (1973) Elements of the theory of optimal discrete processes. Moscow: Science. (In Russ.).
Ибрагимов, Д.Н. (2019) О задаче быстродействия для класса линейных автономных бесконечномерных систем с дискретным временем, ограниченным управлением и вырожденным оператором. Автоматика и Телемеханика. (3), 3–25. https://doi.org/10.1134/S0005231019030012 Ibragimov, D.N. (2019) On the Optimal Speed Problem for the Class of Linear Autonomous Infinite-Dimensional Discrete-Time Systems with Bounded Control and Degenerate Operator. Autom. Remote Control. 80 (3), 393–412. https://doi.org/10.1134/S0005117919030019
Мороз, А.И. (1965) Синтез оптимального по быстродействию управления для линейного дискретного объекта третьего порядка. Автоматика и Телемеханика. (2), 193–207. Moroz, A.I. (1965) Synthesis of Time-Optimal Control for Linear Discrete Objects of the Third Order. Autom. Remote Control. 25 (9), 193–206.
Desoer, C.A., Wing, J. (1961) The Minimal Time Regulator Problem for Linear Sampled-Data Systems: General Theory. Franklin Inst. 272 (3), 208–228. https://doi.org/10.1016/0016-0032(61)90784-0
Bashein, G. (1971) A Simplex Algorithm for On-Line Computation of Time Optimal Controls. IEEE Transactions on Automatic Control.16 (5), 479–482. https://doi.org/10.1109/TAC.1971.1099776
Vlieger, J.H., Verbruggen, H.B., Bruijn, P.M. (1982) A Time-Optimal Control Algorithm for Digital Computer Control. 18 (2), 239–244. https://doi.org/10.1016/0005-1098(82)90111-x
Stamnes, O.N., Callafon, R.A. (2007) Time-Optimal Input Shaping for Discrete-Time LTI Systems with Application to Seek Profiles of a HDD System. In: ASME ISPS Conf. (pp. 146–148).
Kolev, L.V. (1978) Minimum-Fuel Minimum-Time Control of Linear Discrete Systems. International Journal of Control. 27 (1), 21–29. https://doi.org/10.1080/00207177808922344
Blanchini, F., Ukovich, W. (1993) Linear Programming Approach to the Control of Discrete-Time Periodic Systems with Uncertain Inputs. Journal of Optimization Theory and Applications. 78 (3), 523–539. https://doi.org/10.1007/bf00939880
Keerthi, S., Gilbert, E. (1987) Computation of Minimum-Time Feedback Control Laws for Discrete-Time Systems with State-Control Constraints. IEEE Transactions on Automatic Control. 32 (5), 432–435. https://doi.org/10.1109/tac.1987.1104625
Abdelhak, A., Rachik, M. (2010) The Linear Quadratic Minimum-Time Problem for a Class of Discrete Systems. Math. Programming and Operations Research. 59 (4), 575–587.https://doi.org/10.1080/02331930801954672
Amato, F., Cosentino, C., Tommasi, G. D., Pironti, A., Romano, M. (2022) Input–Output Finite-Time Stabilization of Linear Time-Varying Discrete-Time Systems. IEEE Transactions on Automatic Control. 67 (9), 4438–4450. https://doi.org/10.1109/TAC.2022.3161374
Chen, D., Bako, L., Lecoeuche, S. (2012) The Minimum-Time Problem for Discrete-Time Linear Systems: A Non-Smooth Optimization Approach. In: Proceedings of the IEEE International Conference on Control Applications. (pp. 196–201). https://doi.org/10.1109/CCA.2012.6402693
Lee, J., Haddad, W.M. (2022) Fixed Time Stability and Optimal Stabilisation of Discrete Autonomous Systems. International Journal of Control. 96 (9), 2341–2355. https://doi.org/1080/00207179.2022.2092557
Yang, H., Xia, Y., Geng, Q. (2019) Stabilization on Null Controllable Region. In: Analysis and Synthesis of Delta Operator Systems with Actuator Saturation. Studies in Systems, Decision and Control. V. 193. (pp. 39–65). https://doi.org/10.1007/978-981-13-3660-7\_3
Leomanni, M., Costante, G., Ferrante, F. (2022) Time-Optimal Control of a Multidimensional Integrator Chain With Applications. IEEE Control Systems Letters. 6, 2371–2376. https://doi.org/10.1109/LCSYS.2022.3154351
Бортаковский, А.С. (2023) Быстродействие группы управляемых объектов. Известия РАН. Теория и системы управления. (5), 16–42. https://doi.org/31857/S000233882305004 Bortakovskii, A.S. (2023) Speed of Performance of a Group of Controlled Objects. Journal of Computer and Systems Sciences International. 62 (5), 774–799. https://doi.org/10.1134/S1064230723050040
Ибрагимов, Д.Н., Новожилкин, Н.М., Порцева, Е.Ю. (2021) О достаточных условиях оптимальности гарантирующего управления в задаче быстродействия для линейной нестационарной дискретной системы с ограниченным управлением. Автоматика и Телемеханика. (12), 48–72. https://doi.org/31857/S0005231021120047 Ibragimov, D.N., Novozhilin, N.M., Portseva, E.Yu. (2021) On Sufficient Optimality Conditions for a Guaranteed Control in the Speed Problem for a Linear Time-Varying Discrete-Time System with Bounded Control. Autom. Remote Control. 82 (12), 2076–2096. https://doi.org/10.1134/S000511792112002X
Каменев, Г.К. (2010) Численное исследование эффективности методов полиэдральной аппроксимации выпуклых тел. М.: Вычислительный центр РАН. Kamenev, G.K. (2010) Numerical study of the effectiveness of methods for polyhedral approximation of convex bodies. Moscow: Computing Center of the Russian Academy of Sciences. (In Russ.).
Колмогоров, А.Н., Фомин, С.В. (2012) Элементы теории функций и функционального анализа. М.: Физматлит. Kolmogorov, A.N., Fomin, S.V. (2012) Elements of function theory and functional analysis. Moscow: Fizmatlit. (In Russ.).
Рокафеллар, Р. (1973) Выпуклый анализ. М.: Мир. Rokafellar, R. (1973) Convex analysis. Moscow: Mir. (In Russ.).
Ибрагимов, Д.Н., Осокин, А.В., Сиротин, А.Н., Сыпало, К.И. (2022) О свойствах предельных множеств управляемости для класса неустойчивых линейных систем с дискретным временем и ограничениями. Известия РАН. Теория и системы управления. (4), 3–21. https://doi.org/10.31857/S0002338822040102 Ibragimov, D.N., Osokin, A.V., Sirotin, A.N., Sypalo, K.I. (2022) On the Properties of the Limit Control Sets for a Class of Unstable Linear Systems with Discrete Time and Restrictions. Journal of Computer and Systems Sciences International. 61 (4), 467–484. https://doi.org/10.1134/S1064230722040104
Ибрагимов, Д.Н. (2024) О решении задачи быстродействия для линейной системы с дискретным временем и суммарным ограничением на векторное управление. B: SCDG (с. 137-141). Ibragimov, D.N. (2024) On the Solution to the Speed-in-Action Problem for a Linear Disrete-Time System with Summary Constraint on Vector Control. In: SCDG2024. (pp. 137-141).
Циглер, Г.М. (2014) Теория многогранников. М.: МЦНМО. Tsigler, G.M. (2014) Theory of polyhedron. Moscow: MTSNMO. (In Russ.).
Информация об авторах
Арина Александровна Мохначева, student of the Department of Probability Theory and Computer Modeling, Московский Авиационный Институт (национальный исследовательский университет) (МАИ), Москва, Российская Федерация, ORCID: https://orcid.org/0009-0008-2003-2743, e-mail: Arina140803@mail.ru
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Метрики
Просмотров web
За все время: 221
В прошлом месяце: 10
В текущем месяце: 2
Скачиваний PDF
За все время: 42
В прошлом месяце: 4
В текущем месяце: 1
Всего
За все время: 263
В прошлом месяце: 14
В текущем месяце: 3