Цель: Решить задачу построения множеств достижимости линейной непрерывной системы с геометрическими ограничениями на управление. Методы: В качестве метода решения рассматривается дискретизация исходной непрерывной системы. Результаты: Для кусочно-постоянных, кусочно-линейных и сплайн-подобных управлений эквивалентные дискретные системы получены явно. Доказана теорема о скорости сходимости в метрике Хаусдорфа множеств достижимости вспомогательных систем к множеству достижимости исходной системы в зависимости от типа аппроксимации. Проведены численные расчеты. Выводы: Полученные теоретические результаты могут быть использованы при решении задач анализа и для проектирования линейных систем. В зависимости от выбранного типа непрерывного управления, соответствующая дискретная модель может обладать большей точностью в смысле областей достижимости, что, однако, усложнит ее описание.
Для цитаты:Вуксанович, С.М. (2025). Оценка точности аппроксимации множеств достижимости линейной системы с геометрическими ограничениями при различных видах дискретизации. Моделирование и анализ данных,15(2), 110–126. https://doi.org/10.17759/mda.2025150206
Одной из важных задач анализа в математической теории управления является построение множеств достижимости и управляемости. Например, при решении двухточечных задач, т.е. с жесткими ограничениями на начальное и конечное состояние, необходимое и достаточное условие разрешимости сводится к принадлежности данных состояний множествам достижимости и управляемости соответственно. С другой стороны, для систем с терминальным критерием качества задача оптимального управления может быть сведена к поиску минимума или максимума на множестве достижимости, что отражено в классических монографиях (Красовский, 1970), (Понтрягин и др., 1969). Также при рассмотрении задачи быстродействия множество 0-управляемости по определению представляет собой множество уровня функции будущих потерь в методе динамического программирования Беллмана (Беллман, 1960), что используется для синтеза оптимальных процессов.
При этом точное описание множеств достижимости, как правило, не представляется возможным, поскольку предполагает либо решение эволюционных уравнений (аналога дифференциальных уравнений для множеств) (Комаров, 1988), (Куржанский, Никонов, 1993), (Панасюк, Панасюк, 1980), (Толстоногов, 1982), либо вычисления неподвижной точки отображения в пространстве компактов (Арутюнов, Жуковский, 2017), (Беллман, 1960), (Жуковский, 2016), (Жуковский, Панасенко, 2018). Для ряда линейных систем возможно построение полиэдральных аппроксимаций на основе аппарата опорных функций (Красовский, 1970).
С точки зрения практики наиболее эффективным методом построения множеств достижимости является дискретизация непрерывной динамической системы (Мордухович, 1988). В контексте линейных систем данный подход позволяет большую часть соотношений получить явно, что связано с возможностью точного решения системы линейных дифференциальных уравнений (Хартман, 1970). Таким образом, применение дискретизации сводится к исследованию сходимости последовательности множеств достижимости вспомогательных дискретных систем к множеству достижимости исходной непрерывной системы.
Существенным недостатком большей части работ по данной тематике является предположение о кусочно-постоянной структуре управления (Булаев, Шориков, 2017), (Зыков, 2022), (Максимов, 2021), (Никольский, 2021). При этом класс функций управления в непрерывной системе является значительно более широким. В данной статье исследуется скорость сходимости последовательности множеств достижимости дискретной системы в зависимости от выбранного типа дискретизации. Кроме классического кусочно-постоянного управления, допускаются также кусочно-линейные функции и «ломаные» (непрерывные сплайны первого порядка на каждом интервале дискретизации). Также решается задача явного описания эквивалентных дискретных систем для каждого из заданных классов управлений. Значимым результатом является описание всех конструкций в терминах суммы Минковского, линейного преобразования компакта и расстояния Хаусдорфа, что делает возможным численную реализации всех полученных математических соотношений.
Постановка задачи
Рассматривается линейная система управления с непрерывным временем:
где – вектор состояния системы, – начальное состояние, – матрица системы, – множество допустимых значений управления непрерывной системы. Предполагается, что – компакт, , где
Определение 1. Множеством достижимости непрерывной системы (1) называется множество тех состояний, в которые можно перевести данную систему управления за время из начального состояния посредством выбора допустимых управляющих воздействий:
Стоит отметить, что вообще говоря не является компактом.
Требуется явно построить или получить выпуклую и компактную оценку множества достижимости (1). Для решения поставленной задачи предлагается по аналогии с (Зыков, 2022) использовать идею дискретизации. Таким образом, необходимо построить следующую систему с дискретным временем, эквивалентную (1):
где – вектор состояния дискретной системы, – начальное состояние, – матрица системы, – множество допустимых значений управления дискретной системы.
Эквивалентность систем (1) и (2) заключается в том, что траектория системы (1) является допустимой тогда и только тогда, когда найдётся допустимая траектория системы (2), удовлетворяющая условию:
где – шаг дискретизации.
Определение 2. Множеством достижимости дискретной системы (2) называется множество состояний, в которое можно перевести данную систему управления за шагов из начального состояния посредством выбора допустимых управляющих воздействий:
По построению верно равенство Таким образом, дискретизация позволяет полностью решить исходную задачу о построении множества достижимости для непрерывной системы (1), однако такой подход имеет и свои ограничения. Основной сложностью в переходе от (1) к (2) является построение множества , определяющего ограничения в дискретной системе. Для возможности численной реализации данной процедуры предлагается сузить множество допустимых управлений до некоторого подмножества, которое, с одной стороны, при устремлении шага дискретизации к 0, будет в некотором смысле сходится к , а с другой стороны, при фиксированном будет описываться конечным числом параметров, которые можно рассмотреть в качестве вектора управления в системе (2).
В связи с этим определим следующие подмножества множества допустимых управлений . Далее для всех введём обозначение .
1. Кусочно-постоянное управление.
где – константный вектор из
2. Кусочно-линейное управление.
где – константные вектора из
3. Управление в виде полиномиального сплайна первого порядка.
В данном случае отрезок равномерно разбивается на дополнительных отрезков:
где
,
где – константный вектор из .
Таким образом, для решения задачи построения требуется, во-первых, осуществить переход от (1) к (2), заменив на и явным образом построив матрицу и множество , во-вторых, исследовать сходимость множеств к при В качестве критерия сходимости рассматривается расстояние Хаусдорфа.
Определение 3. Пусть – компакты. Тогда расстоянием Хаусдорфа между множествами и называется
Замечание 1. Если , то расстояние Хаусдорфа выражается следующей формулой:
Поскольку вообще говоря не является компактом, то сходимость будет рассматриваться к его замыканию .
Дискретизация
В данном разделе рассматривается дискретизация линейной системы управления с непрерывным временем. Выразим решение (1) в момент времени по аналогии с (Зыков, 2022), полагая начальное условие для произвольного
где – матрица фундаментальной системы решений дифференциальных уравнений (1). Матрица в силу стационарности (1) в данном случае будет иметь вид
Чтобы получить множество для различных случаев, необходимо поочерёдно подставить в (5) управление и вычислить соответствующий интеграл. Введём переходную матрицу:
1. Кусочно-постоянное управление .
В данном случае решение интеграла (5) будет иметь следующий вид:
где – единичная матрица.
Учтём, что в силу стационарности (1) верно равенство
Тогда искомое множество выражается следующим образом:
2. Кусочно-линейное управление .
В данном случае решение интеграла (5) будет иметь следующий вид:
где
Тогда искомое множество выражается следующим образом:
где сумма множеств производится по Минковскому.
3. Управление в виде полиномиального сплайна первого порядка .
В данном случае решение интеграла (5) будет иметь следующий вид:
Тогда искомое множество выражается следующим образом:
Теорема о сходимости множеств достижимости
Рассмотрим вопросы зависимости скорости сходимости множества достижимости дискретной системы (2) к множеству непрерывной системы (1) в зависимости от выбранного типа дискретизации.
Теорема 1. Пусть переход от (1) к (2) для некоторого выполнен в предположении, что для некоторого , т.е. Тогда
1. для справедлива оценка
2. для справедлива оценка
3. для справедлива оценка
Доказательство. Выберем следующее
Поскольку класс всех многочленов, с одной стороны, плотен в (Колмогоров, Фомин, 2021; гл. VII, §1, разд. 4) с другой стороны, является подмножеством то верно равенство
Рассмотрим оператор следующего вида:
Оператор является линейным и ограниченным (Колмогоров, Фомин, 2021; гл. IV, §1, разд. 2, пример 3), при этом в силу (5) при верно, что
Поскольку для линейного оператора ограниченность эквивалентна непрерывности (Колмогоров, Фомин, 2021; гл. IV, §1, разд. 1, теорема 1), то для любого , удовлетворяющего условию (10), верно равенство
Отсюда следует, что
По построению множество достижимости является подмножеством а следовательно, верно (4):
Зафиксируем и рассмотрим произвольный Тогда найдутся такие, что
где фиксировано, а выбирается произвольно. Рассмотрим следующую величину:
где
Оценим величину , находящуюся под интегралом, на некотором интервале Пусть Разложим функцию по формуле Тейлора (Зорич, 1984; гл. 5, §3, разд. 3, теорема 2) в окрестности точки :
Выберем и получим
Таким образом,
Окончательно,
Пусть теперь Разложим функцию по формуле Тейлора (Зорич, 1984; гл. 5, §3, разд. 3, теорема 2) в окрестности точки :
Выберем
Получим с учётом (Формалев, Ревизников, 2004; гл. 3, §3.4, формула 3.36)
Таким образом,
Окончательно,
Пусть Разобьём интеграл на сумму интегралов:
На каждом аналогично п. 2 положим
и получим оценку
Таким образом,
Окончательно,
Таким образом, для каждого найдётся такой, что
Тогда
Теорема 1 доказана.
Пример
Рассмотрим непрерывную систему вида (1). Для неё зададим следующие параметры:
Используя идеи дискретизации и сходимости последовательности множеств достижимости системы (2) к множествам достижимости (1), описанные в теореме 1, можно аппроксимировать искомое множество с произвольным порядком точности дискретным аналогом.
Проведём дискретизацию исходной системы, перейдя к соотношениям вида (2). Построение матрицы фундаментальной системы решений происходит с помощью вычисления спектра и вещественного жорданова базиса матрицы :
В данном случае собственные значения кратные, следовательно, матрица ФСР будет иметь вид
Матрица вычисляется по формуле (6):
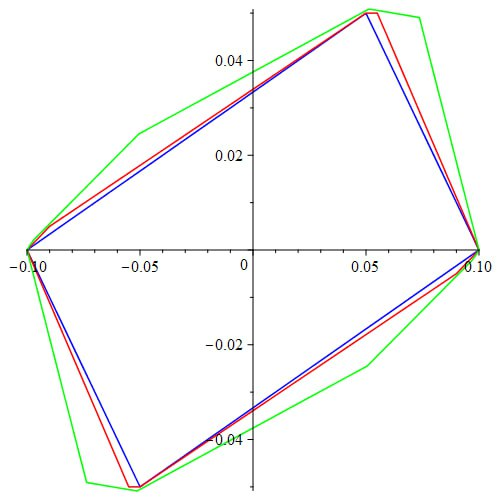
Для каждого из множеств найдём множество допустимых значений управления дискретной системы при с помощью формул (7), (8), (9). На рис. 1 изображены Синий цвет – красный – зелёный – .
Рис. 1. Множества допустимых значений управления дискретной системы (2) при .
Fig. 1. The sets of possible controls actions of the discrete-time system (2) for .
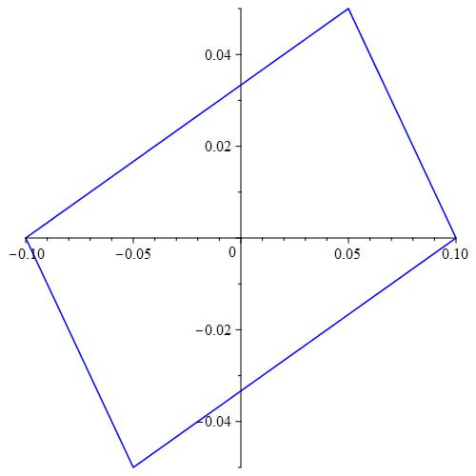
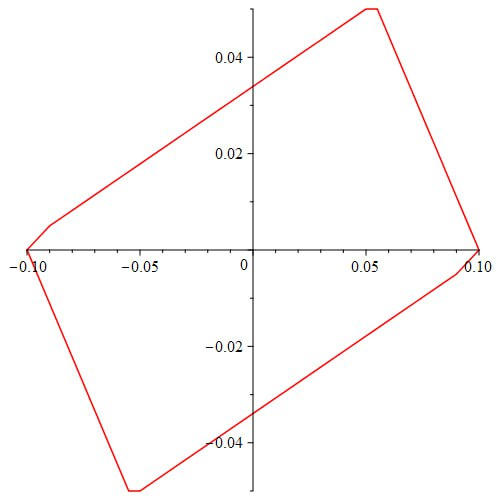
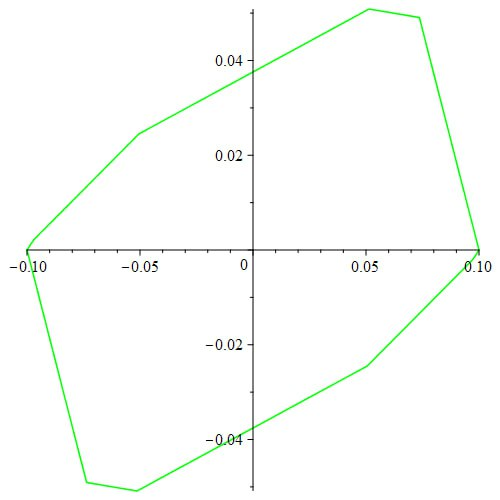
Для построения множеств достижимости воспользуемся представлением, описанным в статье (Ибрагимов, 2019; разд. 2, лемма 1):
Множества (11) для изображены на рис. 2–4.
Рис. 2. Множество достижимости при
Fig. 2. The reachable set at
Рис. 3. Множество достижимости при
Fig. 3. The reachable set for
Рис. 4. Множество достижимости при
Fig. 4. The reachable set for
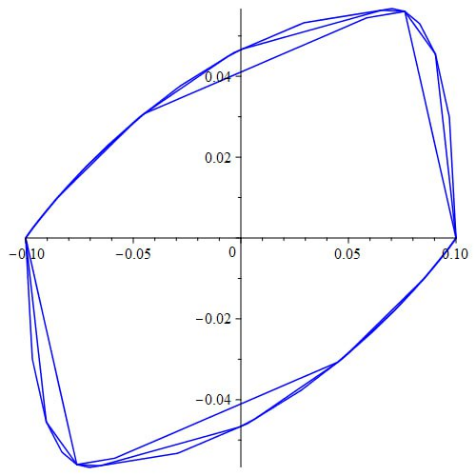
Для построения оценки множества достижимости, исходя из теоремы 1, достаточно устремить , зафиксировав при этом . Проверим это утверждение, рассмотрев последовательность множеств достижимости для разных . Для каждого случая множества пересчитываются в соответствии с формулами, описанными в разделе 3. Результаты расчётов представлены на рис. 5–7.
Рис. 5. Последовательность множеств достижимости при
Fig. 5. The sequence of reachable sets for
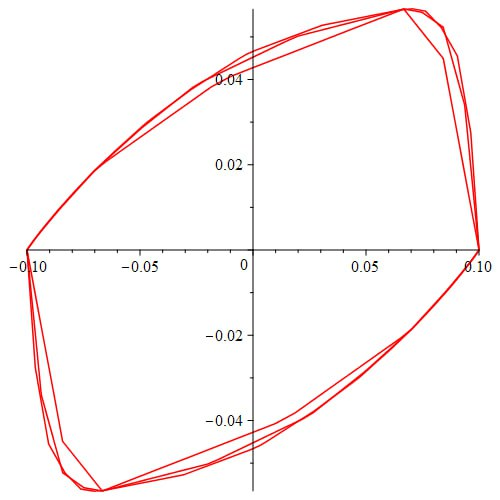
Рис. 6. Последовательность множеств достижимости при
Fig. 6. The sequence of reachable sets for
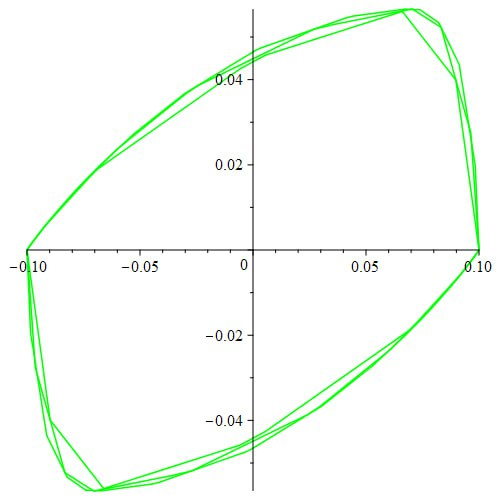
Рис. 7. Последовательность множеств достижимости при
Fig. 7. The sequence of reachable sets for
Заключение
В статье разработан метод построения множеств достижимости непрерывной линейной системы с геометрическими ограничениями на управление на основе методов дискретизации. Для трёх различных подходов дискретизации в явном виде описаны параметры вспомогательных дискретных систем. Доказана сходимость и получена оценка скорости сходимости при использовании кусочно-постоянного управления, кусочно-линейного управления и управления в виде сплайна первого порядка.
В ходе проведённых опытов удалось подтвердить данные, полученные теоретически. Последовательности множеств достижимости при различных типах дискретизации управления действительно сходятся к одному и тому же множеству. Скорость сходимости напрямую зависит от типа выбранного управления при дискретизации. Последовательность множеств достижимости при управлении сплайном сходится быстрее всего по N, кусочно-линейное – второе по скорости, кусочно-постоянное – последнее, что подтверждает результаты теоремы 1.
Полученные теоретические результаты могут быть использованы при решении задач анализа и для проектирования линейных систем. В зависимости от выбранного типа непрерывного управления, соответствующая дискретная модель может обладать большей точностью в смысле областей достижимости, что, однако, усложнит ее описание. Возможность проведения численного моделирования в соответствии с методикой, предложенной в статье, позволяет соотнести эти два критерия качества дискретизации.
Литература
Арутюнов, А.В., Жуковский, С.Е. (2017) Точки совпадения отображений в пространствах с векторной метрикой и их приложения к дифференциальным уравнениям и управляемым системам // Дифференц. уравнения. Т. 53. № 11. С. 1473–1481. Arutyunov, A.V., Zhukovsky, S.E. (2017) Coincidence points of mappings in spaces with a vector metric and their applications to differential equations and control systems // Differential Equations. V. 53. № 11. P. 1473–1481.
Беллман, Р. (1960) Динамическое программирование. М.: ИИЛ. Bellman, R. (1960) Dynamic programming. Moscow: IIL. (In Russ.).
Булаев, В.В., Шориков, А.Ф. (2017) Методика дискретизации линейных динамических систем // Итоги науки и техн. Соврем. мат. и ее прил. Темат. обз. Т. 132. С. 20–23. Bulaev, V.V., Shorikov, A.F. (2017) Methodology for discretization of linear dynamic systems // Results of science and technology. Modern mathematics and its applications. Subject review. V. 132. P. 20–23.
Жуковский, Е.С. (2016) О точках совпадения векторных отображений // Изв. вузов. Математика. № 10. С. 14–28.Zhukovsky, E.S. (2016) On the coincidence points of vector mappings // Izv. vuzov. Mathematics. № 10. P. 14–28.
Жуковский, Е.С., Панасенко, Е.А. (2018) О неподвижных точках многозначных отображений в пространствах с векторнозначной метрикой // Тр. ИММ УрО РАН. Т. 24. № 1. С. 93–105.DOI: 10.21538/0134-4889-2018-24-1-93-105. Zhukovsky, E.S., Panasenko, E.A. (2018) On fixed points of multivalued mappings in spaces with vector-valued metric // Proceedings of IMM UB RAS. V. 24. № 1. P. 93–105.DOI: 10.21538/0134-4889-2018-24-1-93-105.
Зорич, В.А. (1984) Математический анализ. Часть I. М.: Наука. Zorich, V.A. (1984) Mathematical analysis. Part I. Moscow.: Science (In Russ.).
Зыков, И.В. (2022) Приближённое вычисление множеств достижимости линейных управляемых систем при разнотипных ограничениях на управление // Известия Института математики и информатики Удмуртского государственного университета. Т. 60. С. 16–33. Zykov, I.V. (2022) Approximate calculation of reachability sets of linear control systems under different types of control constraints // Bulletin of the Institute of Mathematics and Informatics of the Udmurt State University. V. 60. P. 16–33.
Ибрагимов, Д.Н. (2019) О задаче быстродействия для класса линейных автономных бесконечномерных систем с дискретным временем, ограниченным управлением и вырожденным оператором // АиТ. № 3. C. 3–25. DOI: 10.1134/S Ibragimov, D.N. (2019) On the Optimal Speed Problem for the Class of Linear Autonomous Infinite-Dimensional Discrete-Time Systems with Bounded Control and Degenerate Operator // Autom. Remote Control. V. 80. № 3. P. 393–412.DOI: 10.1134/S0005117919030019.
Колмогоров, А.Н., Фомин, С.В. (2012) Элементы теории функций и функционального анализа. М.: Физматлит, 570с. Kolmogorov, A.N., Fomin, S.V. (2012) Elements of function theory and functional analysis. Moscow: Fizmatlit, 570 p. (In Russ.).
Комаров, В.А. (1988) Уравнение множеств достижимости дифференциальных включений в задаче с фазовыми ограничениями // Тр. мат. инта АН СССР им. В.А.Стеклова. Т. 185. С. 116–125. Komarov, V.A. (1988) Equation of attainability sets of differential inclusions in a problem with phase constraints // Proceedings of the Mat. Inst. of the USSR Academy of Sciences named after V.A. Steklov. V. 185, P. 116–125.
Красовский, Н.Н. (1970) Игровые задачи о встрече движений. М.: Наука. Krasovskiy, N.N. (1970) Game problems about meeting of movements. Moscow: Science (In Russ.).
Куржанский, A.B., Никонов, О.И. (1993) Эволюционные уравнения для пучков траекторий синтезированных систем управления // Докл. РАН. Т. 333. № 5. С. 578–581. Kurzhansky, A.V., Nikonov, O.I. (1993) Evolutionary equations for trajectory bundles of synthesized control systems // Reports of the Russian Academy of Sciences. V. 333. № 5. P. 578–581.
Максимов, В.П. (2021) О внутренних оценках множеств достижимости для непрерывно-дискретных систем с дискретной памятью // Труды Института математики и механики УрО РАН. Т. 27. № 3. С. 141–151.DOI: 10.21538/0134-4889-2021-27-3-141-151. Maksimov, V.P. (2021) On interior estimates of reachability sets for continuous-discrete systems with discrete memory // Proceedings of the Institute of Mathematics and Mechanics, Ural Branch of the Russian Academy of Sciences. V. 27. № 3. P. 141–151.DOI: 10.21538/0134-4889-2021-27-3-141-151.
Мордухович, Б.Ш. (1988) Методы аппроксимаций в задачах оптимизации и управления. М.: Наука. Mordukhovich, B.S. (1988) Approximation methods in optimization and control problems. Moscow: Science (In Russ.).
Никольский, М.С. (2021) Линейные управляемые объекты с фазовыми ограничениями. Приближенное вычисление множеств достижимости // Труды Института математики и механики УрО РАН. Т. 27. № 2. С. 162–168.DOI: 10.21538/0134-4889-2021-27-2-162-168. Nikolsky, M.S. (2021) Linear Controlled Objects with Phase Constraints. Approximate Calculation of Reachability Sets // Proceedings of the Institute of Mathematics and Mechanics, Ural Branch of the Russian Academy of Sciences. V. 27. № 2. P. 162–168. DOI: 10.21538/0134-4889-2021-27-2-162-168.
Панасюк, А.И., Панасюк, В.И. (1980) Об одном уравнении, порождаемом дифференциальным включением // Мат. заметки. Т. 27. № 3. С. 429–437. Panasyuk, A.I., Panasyuk, V.I. (1980) On an equation generated by a differential inclusion // Mat. notes. V. 27. № 3. P. 429–437.
Понтрягин, Л.С., Болтянский, В.Г., Гамкрелидзе, Р.В., Мищенко, Б.Ф. (1969) Математическая теория оптимальных процессов. М.: Наука. Pontryagin, L.S., Boltyanskiy, V.G., Gamkrelidze, R.V., Mishchenko, B.F. (1969) Mathematical theory of optimal processes. Moscow: Science (In Russ.).
Толстоногов, A.A. (1982) Об уравнении интегральной воронки дифференциального включения // Мат. заметки. Т. 32. № 6. С. 841–852. DOI: 10.1007/BF01145876. Tolstonogov, A.A. (1982) On the equation of the integral funnel of a differential inclusion // Mat. notes. V. 32. № 6. P. 841–852. DOI: 10.1007/BF01145876.