Введение
Задача коммивояжёра (TSP — Traveling Salesman Problem) является одной из классических NP-трудных задач комбинаторной оптимизации, имеющая широкое практическое применение в логистике, транспортном планировании, биоинформатике и других областях (Applegate et al., 2006; Karp, 1972). Её суть заключается в поиске на графе кратчайшего замкнутого маршрута, проходящего через все заданные пункты с возвратом в исходную точку. Точное решение TSP для большого числа вершин становится вычислительно неосуществимым из-за экспоненциального роста сложности. Это обуславливает актуальность разработки и сравнительного анализа метаэвристических методов, позволяющих находить приближённые решения с приемлемой точностью за разумное время (Blum, Roli, 2003).
Среди множества метаэвристик особый интерес представляют алгоритмы, основанные на природных системах: муравьиный алгоритм (ACO — Ant Colony Optimization), алгоритм роя частиц (PSO — Particle Swarm Optimization) и алгоритм имитации отжига (SA — Simulated Annealing). Они демонстрируют высокую эффективность в решении сложных оптимизационных задач благодаря способности балансировать между исследованием пространства решений и эксплуатацией найденных локальных оптимумов (Bonabeau, Dorigo, Theraulaz, 1999; Kirkpatrick, Gelatt, Vecchi, 1983).
Муравьиный алгоритм, основанный на поведении колоний муравьёв, использует механизм феромонных следов для накопления информации о качестве решений (Штовба, 2003; Colorni, Dorigo, Maniezzo, 1991). Алгоритм роя частиц имитирует коллективное поведение стай птиц, где каждая частица адаптирует свою траекторию на основе личного и группового опыта (Kennedy, Eberhart, 1995). Алгоритм имитации отжига, заимствованный из металлургии, применяет вероятностный подход для выхода из локальных минимумов (Kirkpatrick, Gelatt, Vecchi, 1983). Несмотря на обширные исследования этих методов (например, (Иванов, Смирнова, 2021; Попов, Соколов, 2019)), их сравнительная эффективность для TSP остаётся предметом дискуссий, особенно при увеличении размерности задачи.
Целью данной работы является сравнительный анализ эффективности трёх метаэвристических алгоритмов — ACO, PSO и SA — для решения классической задачи коммивояжёра. В рамках исследования:
-
Проведена параметрическая настройка каждого алгоритма для задачи со 100 пунктами.
-
Оценена сходимость методов на основе длины найденного маршрута и числа итераций.
-
Выявлены оптимальные комбинации параметров для каждого из этих алгоритма.
Гипотеза исследования заключается в том, что муравьиный алгоритм, благодаря механизму положительной обратной связи через феромоны, обеспечит более высокую точность решения по сравнению с PSO и SA, но требует больше вычислительных ресурсов.
Научная новизна работы заключается в комплексном экспериментальном сравнении алгоритмов на идентичных тестовых данных с акцентом на влияние параметров на результат. Практическая значимость связана с рекомендациями по выбору метода для задач маршрутизации в реальных условиях, таких, как планирование логистических цепей в условиях севера и Арктики (Иванов, 2021; Тутыгин, Антипов, Коробов, 2020).
Исследование опирается на работы отечественных и зарубежных авторов, включая (Dorigo et al., 2021; Попов, Соколов, 2019; Hussien et al., 2022), а также собственные вычислительные эксперименты. Результаты представлены в сравнительных таблицах и визуализированы для наглядности.
Постановка задачи коммивояжёра
где π — перестановка пунктов, задающая порядок их посещения.
Для решения поставленной задачи выбраны три метаэвристических метода: метод имитации отжига, муравьиной колонии, роя частиц.
Решение задачи коммивояжёра алгоритмом имитации отжига
Алгоритм имитации отжига (SA) (Kirkpatrick, Gelatt, Vecchi, 1983) основан на аналогии с термообработкой металлов. Атомы при нагревании покидают свои позиции в кристаллической решётке, а при последующем охлаждении стремятся занять положения с минимальной энергией. Важной особенностью процесса является возможность временного перехода в состояния с более высокой энергией, что предотвращает застревание в локальных минимумах.
Современные исследования (Tsotskas, Kipouros, 2022; Zhang et al., 2020) подтверждают значимость метода имитации отжига среди эффективных эвристик для решения задачи коммивояжёра. Алгоритм показывает наилучшие результаты на задачах средней размерности (Johnson et al., 1989). Приведём SA для решения задачи коммивояжёра со 100 пунктами с нормализованными координатами из единичного квадрата:
Шаг 2. Находим начальное решение (x_current) – случайный маршрут с посещением всех пунктов, вычисляем энергию - длину пути (E_current).
Шаг 3. Основной цикл – метод имитации отжига. Начиная с самого высокого значения температуры (Тmax) производим вычисления, пока T > Тmin и не достигнуто i_max итераций.
Шаг 3.1. Генерируем новое решение (x_new) путём случайной перестановки двух пунктов в маршруте.
Шаг 3.3. Обновляем лучшее решение, понижаем температуру.
Шаг 4. Сохраняем лучшее найденное решение, визуализируем результаты.
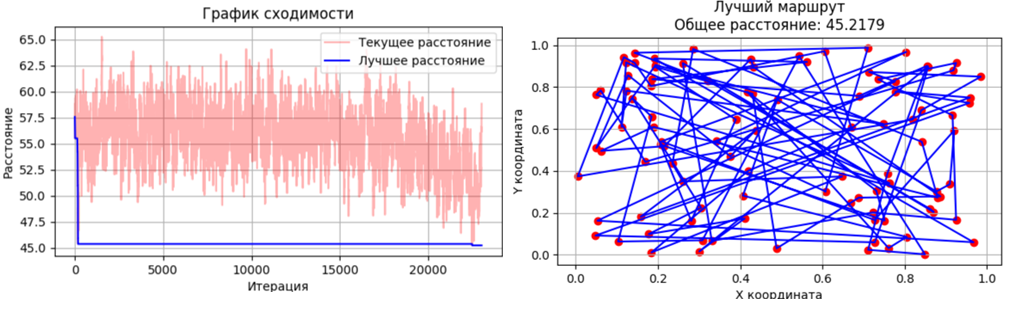
Fig.1. The result of solving the traveling salesman problem with 100 points by simulated annealing
Решение задачи коммивояжёра алгоритмом муравьиной колонии
Муравьиный алгоритм (ACO), разработанный М. Дориго в 1990-х годах (Dominguez, Cannella, 2020), относится к природным вычислениям. Он моделирует поведение муравьёв, оставляющих феромоновые следы для нахождения оптимальных путей. В вычислительной реализации каждый «муравей» строит решение задачи коммивояжёра, выбирая следующий пункт на основе уровня феромона и расстояния. ACO эффективен для задач средней размерности благодаря параллелизму, устойчивости к локальным оптимумам и масштабируемости. Приведём алгоритм ACO для решения задачи коммивояжёра со 100 пунктами с нормализованными координатами из единичного квадрата.
Шаг 2. Размещаем муравьёв по вершинам.
Шаг 3. Основной цикл – метод муравьиной колонии, выполняем, пока не достигнуто i_max.
Шаг 3.2. После сравнения всех найденных решений муравьями, находим лучшее решение и обновляем лучший маршрут и минимальную длину пути.
Шаг 4. Выводим лучший маршрут и его длину, визуализируем результат.
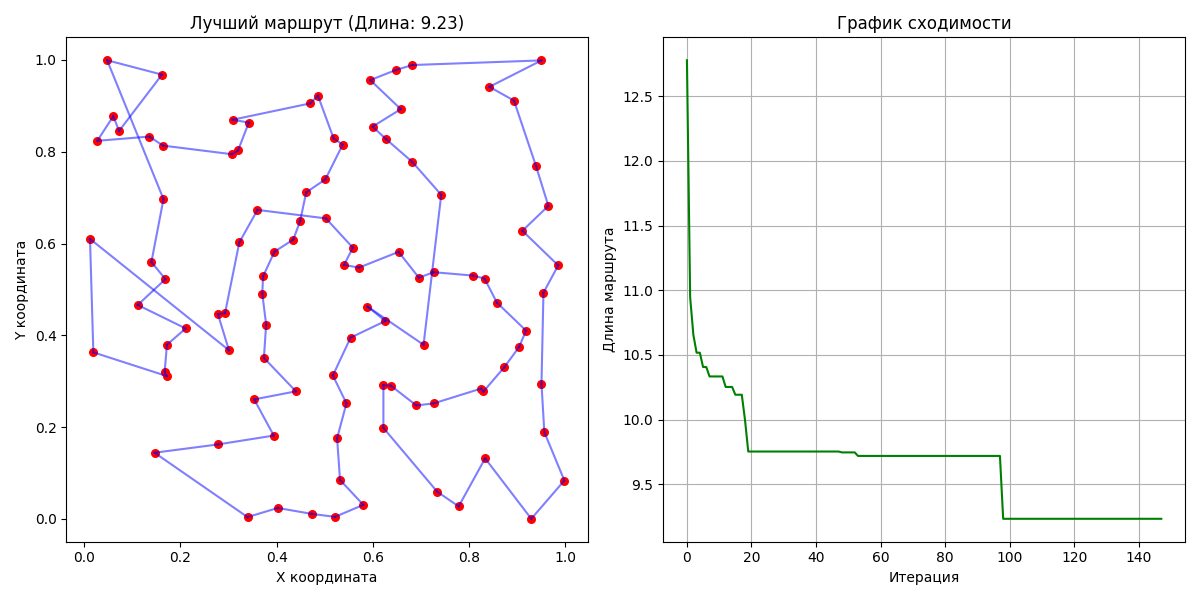
Рис.2. Результат решения задачи коммивояжёра со 100 пунктами методом муравьиной колонии
Fig.2. The result of solving the traveling salesman problem with 100 points using the antcolony method
Решение задачи коммивояжёра алгоритмом роя частиц
Метод роя частиц (PSO) представляет собой мультиагентный алгоритм оптимизации, в котором множество взаимодействующих частиц совместно исследуют пространство решений. Разработанный Кеннеди и Эберхартом (Bonabeau, Dorigo, Theraulaz, 1999) на основе идей Рейнольдса, он моделирует движение частиц, которые корректируют свою скорость и положение, ориентируясь на личный лучший результат и лучшее решение всей группы. Алгоритм эффективно исследует пространство поиска, сходясь к оптимуму (Попов, Соколов, 2019). Приведём алгоритм PSO для решения задачи коммивояжёра со 100 пунктами с нормализованными координатами из единичного квадрата.
Шаг 2. Определяем лучший маршрут (xbest) среди всех частиц и его длину (Lmin).
Шаг 3. Основной цикл – метод роя частиц, выполняем, пока не достигнуто i_max.
Шаг 3.3. Вычисляем Lk и Lmin. Если найденные личное и глобальное решения лучше, то обновляем их.
Шаг 4. Выводим лучший маршрут и его длину, визуализируем результат.
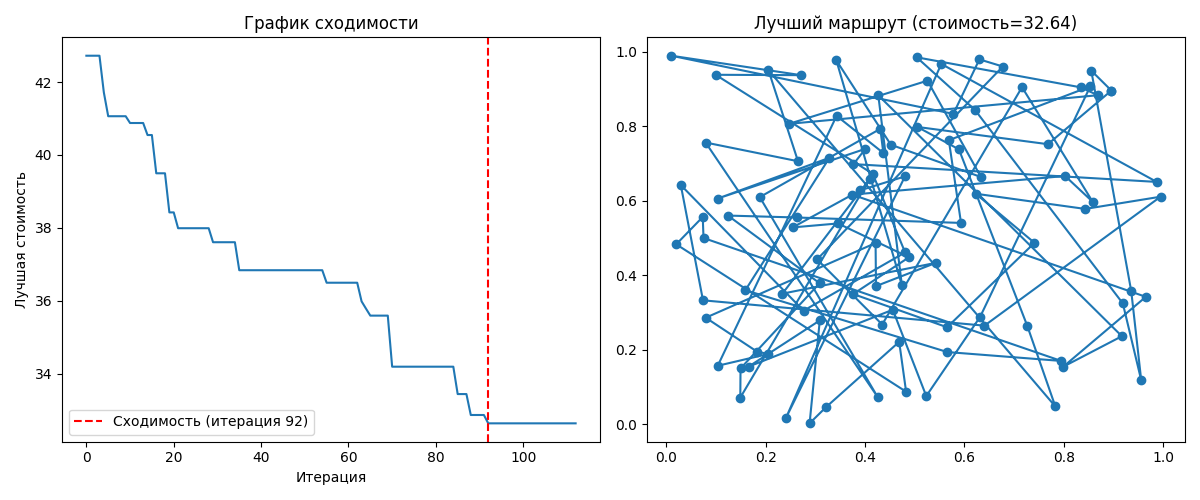
Рис.3. Результат решения задачи коммивояжёра со 100 пунктами методом роя частиц
Fig.3. The result of solving the traveling salesman problem with 100 points by the particles warm method
Результаты вычислительных экспериментов
Для определения оптимальных параметров алгоритмов проведена серия вычислительных экспериментов с варьированием ключевых коэффициентов каждого метода.
В параметрических экспериментах при решении задачи коммивояжёра с использованием метода PSO варьировались коэффициент начальной температуры Тmax и коэффициент охлаждения α. Полученные результаты представлены в табл.1. В правом верхнем углу каждой ячейки указан номер шага сходимости алгоритма, а в нижнем левом углу – значение длины найденного маршрута.
Таблица 1 / Table 1. Решение задачи коммивояжёра методом имитации отжига Solving the traveling salesman problem by simulated annealing
|
Тmax α |
1000 |
800 |
600 |
400 |
200 |
100 |
|
0,001 |
6000 41,72 |
6000 40,61 |
6000 43,34 |
5000 45,83 |
5000 42,55 |
4000 46,58 |
|
0,0008 |
8000 44,89 |
8000 43,45 |
7000 42,9 |
7000 39,32 |
6000 42,08 |
5000 44,73 |
|
0,0006 |
11000 44,56 |
11000 44,51 |
10000 41,59 |
9000 41,78 |
8000 43,02 |
7000 39,42 |
|
0,0004 |
17000 42,65 |
16000 42,10 |
15000 45,13 |
14000 41,51 |
13000 39,46 |
11000 44,36 |
|
0,0002 |
34000 40,17 |
33000 42,90 |
31000 40,81 |
29000 41,27 |
26000 40,72 |
43000 44,51 |
|
0,0001 |
69000 40,00 |
66000 41,42 |
63000 41,48 |
59000 39,69 |
52000 40,69 |
46000 42,09 |
Анализируя полученные результаты, можно сделать выводы о том, что с понижением начальной температуры алгоритм быстрее сходится к оптимальному решению: чем выше значение скорости охлаждения, тем меньше итераций требуется для получения итогового значения; значения длин маршрутов варьируется от 39,32 до 46,58.
В параметрических экспериментах при решении задачи коммивояжёра с использованием метода ACO варьировались коэффициенты α – значимость феромона, β – значимость расстояния и ρ – интенсивность испарения феромона. Полученные результаты представлены в табл.2. В правом верхнем углу каждой ячейки указан номер шага алгоритма, а в нижнем левом – значение длины найденного маршрута. Серым цветом выделены ячейки с полученной длиной маршрута меньше 9.00.
Таблица 2 / Table 2
Решение задачи коммивояжёра методом муравьиной колонии
Solving the traveling salesman problem by the ant colony method
|
ρ=0,3 |
||||||||
|
β α |
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
|
0
|
44 45,08 |
175 35,83 |
22 30,35 |
108 22,29 |
8 17,43 |
56 12,34 |
53 11,48 |
16 11,00 |
|
0,5 |
58 45,36 |
71 28.03 |
49 16.23 |
46 11,78 |
75 10,71 |
72 9,78 |
74 9,35 |
98 9,23 |
|
1 |
43 42,18 |
45 12,07 |
28 10,38 |
73 9,11 |
114 8,01 |
95 8,68 |
175 8,29 |
87 7,95 |
|
1,5 |
74 44,94 |
41 8.91 |
33 8,59 |
27 8,94 |
54 8,79 |
5 8,38 |
24 8,14 |
55 8,15 |
|
2 |
1 42,17 |
51 10,83 |
12 9,07 |
6 9,54 |
25 7,98 |
11 8,67 |
21 8,21 |
6 8,80 |
|
2,5 |
1 45.06 |
6 13,62 |
5 9,40 |
8 7,96 |
2 8,25 |
4 8,31 |
44 8,70 |
7 8,97 |
|
3 |
1 44,48 |
6 13,29 |
16 9,12 |
14 9,56 |
16 8,74 |
3 8,60 |
8 9,33 |
5 8,25 |
|
3,5 |
1 43,79 |
6 14,12 |
8 10,56 |
8 8,66 |
3 8,57 |
5 8,56 |
4 9,04 |
26 8,66 |
|
ρ=0,5 |
||||||||
|
β α |
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
|
0
|
117 41,04 |
444 36,81 |
181 28,15 |
100 21,13 |
395 16,42 |
30 13,38 |
95 11,7 |
66 10,95 |
|
0,5 |
251 43,37 |
234 28,75 |
456 42,9 |
112 12,24 |
424 9,93 |
417 8,87 |
371 8,82 |
448 7,88 |
|
1 |
456 42,9 |
332 10,87 |
485 9,44 |
458 8,71 |
190 8,50 |
66 8,64 |
44 8.12 |
25 8.66 |
|
1,5 |
2 43,57 |
56 9,70 |
69 8,59 |
32 8,25 |
31 8,49 |
39 8,37 |
27 8,31 |
15 8,58 |
|
2 |
49 44,53 |
37 10,23 |
27 9,26 |
18 8,82 |
17 8,85 |
20 8,97 |
5 8,32 |
3 8,98 |
|
2,5 |
22 45.38 |
31 10,65 |
22 8,85 |
15 8,77 |
10 9,43 |
8 8,39 |
5 8,93 |
5 8,64 |
|
3 |
25 43,64 |
22 10,87 |
18 9,33 |
13 8,33 |
5 9,14 |
3 8,92 |
8 7,86 |
8 9,02 |
|
3,5 |
20 44,29 |
18 11,10 |
10 9,82 |
8 8,56 |
8 8,62 |
5 8,75 |
8 8,69 |
3 8,39 |
|
ρ=0,7 |
||||||||
|
β α |
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
|
0
|
93 44,87 |
74 34,44 |
70 30,2 |
23 21,64 |
25 17,22 |
17 13,46 |
10 11,01 |
6 11,13 |
|
0,5 |
87 44,82 |
52 22,29 |
22 14,87 |
67 11,39 |
15 10,30 |
21 9,70 |
45 8,32 |
14 9,21 |
|
1 |
108 43,77 |
51 11,77 |
88 8,64 |
111 8,91 |
61 8,32 |
23 7,93 |
65 8.24 |
30 8.29 |
|
1,5 |
3 45,62 |
29 9,74 |
26 8,68 |
26 8,04 |
16 8,16 |
49 7,99 |
32 8,57 |
55 8,46 |
|
2 |
1 45,53 |
21 11,63 |
10 9,12 |
21 8,39 |
10 8,29 |
3 8,00 |
20 8,40 |
10 8,43 |
|
2,5 |
2 46,27 |
7 13,47 |
7 9,39 |
7 9,37 |
2 9,49 |
3 9,02 |
5 8,44 |
4 8,75 |
|
3 |
2 44,50 |
4 14,79 |
8 10,18 |
19 9,79 |
5 8,81 |
3 8,71 |
3 8,61 |
15 8,30 |
|
3,5 |
1 44,61 |
10 16,50 |
8 9,75 |
7 9,18 |
6 9,78 |
3 9,06 |
1 8,57 |
3 8,39 |
Проведенные исследования демонстрируют существенное преимущество муравьиного алгоритма перед методом имитации отжига при решении задачи коммивояжёра. Экспериментальные данные подтверждают, что увеличение параметра видимости β приводит к систематическому снижению длины конечного маршрута. Однако анализ чувствительности алгоритма выявил значительную зависимость результатов от баланса между параметрами α и β – даже незначительные изменения их значений вызывают существенные колебания качества решения. Эта особенность объясняется сложным нелинейным взаимодействием факторов влияния феромонных следов и эвристической информации о расстояниях между пунктами. Наблюдаемая неустойчивость работы алгоритма при нарушении баланса параметров подчеркивает важность их тщательного подбора для каждой конкретной постановки задачи.
В параметрических экспериментах при решении задачи коммивояжёра с использованием метода PSO варьировались параметры w – коэффициент инерции, c1 – когнитивный коэффициент и c2 – социальный коэффициент. Полученные результаты представлены в табл.3. В правом верхнем углу каждой ячейки указан номер шага сходимости алгоритма, а в нижнем левом углу – значение длины найденного маршрута. Серым цветом выделены ячейки с полученной длиной маршрута меньше 30.00.
Таблица 3 / Table 3
Решение задачи коммивояжёра методом роя частиц
Solving the traveling salesman problem by the particle swarm method
|
w = 0,2 |
||||||||
|
с1 с2 |
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
1,2 |
1,4 |
|
0
|
2 48,30 |
1 46,41 |
499 45,71 |
499 44,64 |
1 45,29 |
499 49,55 |
1 46,52 |
1 45,56 |
|
0,2 |
121 32,55 |
35 39,44 |
249 26,98 |
234 28,33 |
221 25,20 |
240 25,51 |
282 24,18 |
60 39,82 |
|
0,4 |
93 32,89 |
83 31,65 |
81 31,02 |
87 31,98 |
115 30,14 |
132 30,33 |
120 30,59 |
150 25,33 |
|
0,6 |
36 33,88 |
35 32,94 |
43 31,92 |
54 30,18 |
63 31,51 |
72 30,83 |
110 27,54 |
90 27,12 |
|
0,8 |
24 30,67 |
32 33,87 |
27 40,79 |
39 30,47 |
50 32,89 |
40 30,42 |
57 28,48 |
48 30,33 |
|
1 |
15 34,10 |
24 29,98 |
28 31,57 |
35 28,81 |
34 30,69 |
44 31,44 |
58 30,39 |
39 28,49 |
|
1,2 |
17 34,57 |
20 33,22 |
17 31,41 |
37 29,81 |
45 33,32 |
29 31,63 |
45 28,01 |
27 33,43 |
|
1,4 |
12 36,14 |
17 34,18 |
17 31,36 |
26 33,84 |
18 34,09 |
29 28,33 |
40 31,15 |
50 27,19 |
|
w = 0,4 |
||||||||
|
с1 с2 |
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
1,2 |
1,4 |
|
0
|
1 48,44 |
8 43,30 |
8 49,79 |
2 49,05 |
4 43,78 |
8 46,49 |
1 46,92 |
5 50,43 |
|
0,2 |
110 34,04 |
16 41,96 |
21 45,32 |
138 40,68 |
339 27,95 |
18 43,55 |
34 39,46 |
88 40,27 |
|
0,4 |
40 33,44 |
144 30,65 |
175 30,02 |
198 28,75 |
29 41,24 |
50 38,31 |
171 34,85 |
53 41,08 |
|
0,6 |
67 34,19 |
73 30,29 |
142 31,66 |
145 29,88 |
21 39,97 |
19 38,72 |
40 41,68 |
13 43,47 |
|
0,8 |
48 35,92 |
81 32,42 |
146 30,19 |
189 28,87 |
178 27,06 |
217 29,98 |
83 36,06 |
28 44,67 |
|
1 |
40 31,67 |
47 34,23 |
110 27,13 |
156 29,18 |
137 29,09 |
46 36,91 |
22 40,26 |
63 33,73 |
|
1,2 |
41 30,76 |
60 28,39 |
79 30,57 |
126 29,14 |
147 28,95 |
210 32,07 |
37 38,98 |
243 30,95 |
|
1,4 |
35 30,73 |
44 34,18 |
62 31,00 |
86 31,62 |
154 28,60 |
212 27,88 |
302 25,06 |
152 33,01 |
|
w = 0,6 |
||||||||
|
с1 с2 |
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
1,2 |
1,4 |
|
0
|
1 44,27 |
2 44,18 |
1 47,58 |
1 47,53 |
2 45,58 |
20 43,77 |
4 47,11 |
15 47,07 |
|
0,2 |
140 34,08 |
42 41,35 |
42 43,47 |
34 44,16 |
8 46,54 |
28 42,75 |
37 43,68 |
22 42,13 |
|
0,4 |
152 33,06 |
85 42,51 |
23 40,42 |
22 44,71 |
64 42,03 |
10 42,87 |
42 46,12 |
40 43,78 |
|
0,6 |
143 32,13 |
4 42,86 |
23 44,04 |
7 45,23 |
34 45,49 |
31 43,49 |
12 45,73 |
20 41,07 |
|
0,8 |
134 33,09 |
12 40,33 |
27 40,79 |
6 43,17 |
61 41,96 |
38 43,48 |
13 41,98 |
26 46,11 |
|
1 |
217 31,29 |
70 41,14 |
10 45,45 |
6 45,59 |
29 43,66 |
42 45,64 |
33 46,72 |
24 41,81 |
|
1,2 |
221 31,09 |
5 44,29 |
7 45,53 |
15 41,73 |
12 45,28 |
44 41,5 |
8 44,43 |
27 44,34 |
|
1,4 |
181 31,25 |
45 42,26 |
17 42,17 |
8 43,52 |
18 44,14 |
4 44,03 |
27 42,18 |
499 40,79 |
Сравнительный анализ продемонстрировал промежуточное положение алгоритма роя частиц по эффективности между методом имитации отжига и муравьиным алгоритмом при решении задачи коммивояжёра. Важно отметить, что для получения качественных решений требуется проведение многочисленных вычислительных экспериментов с различными комбинациями параметров. Однако даже при фиксированных значениях c1 и c2 наблюдается значительная вариативность результатов, что свидетельствует о высокой чувствительности алгоритма к начальным условиям и сложном характере взаимодействия управляющих параметров. Данная особенность подчеркивает необходимость разработки более совершенных механизмов балансировки влияния различных факторов в алгоритме.
Обсуждение результатов
Проведенное сравнительное исследование SA, ACO и PSO для решения задачи коммивояжёра позволило выявить существенные различия в их эффективности. Наибольшую точность продемонстрировал муравьиный алгоритм, который в среднем находил маршруты значительно короче по сравнению с методом имитации отжига и с алгоритмом роя частиц для тестовых примеров размерностью в 100 вершин. Это объясняется способностью ACO эффективно комбинировать положительную обратную связь через феромонные следы с эвристической информацией о расстояниях между пунктами, что обеспечивает устойчивый баланс между исследованием пространства решений и эксплуатацией найденных хороших маршрутов.
Полученные результаты согласуются с современными исследованиями в области метаэвристической оптимизации, подтверждая, что для задач комбинаторной оптимизации, подобных TSP, методы, основанные на коллективном интеллекте (ACO, PSO), как правило, превосходят подходы, основанные на индивидуальном поиске (SA). Особую значимость это имеет для морской транспортной логистики Арктического региона, где в условиях высокой неопределенности для принятия решений требуется учет множества динамических факторов и оптимизация сложных маршрутных сетей (пример расчета маршрутов для портов и портопунктов Белого моря приведен авторами в работе (Кошуняева, Тутыгин, 2025)).
Заключение
Сравнительный анализ метаэвристических методов (имитации отжига, муравьиного и роя частиц) подтвердил гипотезу о преимуществе подходов, основанных на коллективном интеллекте, для решения задачи коммивояжёра. Наибольшую эффективность продемонстрировал муравьиный алгоритм, обеспечивающий оптимальный баланс между качеством решений и вычислительными затратами. Это преимущество объясняется эффективным сочетанием механизмов положительной обратной связи через феромонные следы и использования эвристической информации о расстояниях между городами.
Полученные результаты имеют практическую ценность для различных областей, включая арктическую морскую транспортную логистику, где требуется устойчивая оптимизация маршрутов в условиях высокой неопределённости.