Введение
В настоящее время установлено, что восприятие тела базируется на механизмах мульти- сенсорной интеграции [Ehrsson, 2012]: мозг интегрирует сенсорную информацию, полученную от разных органов чувств. Восприятие тела не является фиксированным и заданным процессом, а постоянно перестраивается на основании сличения одновременно поступающих в нервную систему сигналов [Lackner, 2005], подтверждением чему служит феномен телесных иллюзий. Телесные иллюзии можно определить как «мультимодальные феномены, возникающие в соматосенсорной сфере в результате моделирования особых условий восприятия» [Перепелкина, 2014]. В результате контролируемого изменения тех или иных характеристик в образ тела может встраиваться искусственный объект (так, резиновая рука или торс манекена начинают ощущаться как часть собственного тела).
Начало экспериментальному изучению соматоперцепции в лабораторных условиях положило исследование Ботвиника и Коэна [Botvinick, 1998], в котором описана классическая иллюзия резиновой руки (ИРР). При формировании этой иллюзии испытуемый чувствует прикосновения к своей руке, спрятанной за перегородкой, и в то же время видит, как касаются искусственного резинового протеза. Благодаря тому, что зрение, как правило, играет ведущую роль в восприятии тела [Graziano, 1999], образ конечности в иллюзии «перемещается» в объект, который испытуемый видит, а не ощущает тактильно. По мере стимуляции у большинства людей возникает ощущение, что они чувствуют прикосновения на поверхности резиновой руки, вместе с тем постепенно усиливается чувство обладания ею («ownership»), как будто та становится частью их тела, — такие субъективные ощущения оцениваются с помощью опросника. В качестве поведенческого показателя сформированности иллюзии обычно используют измерение проприоцептивного смещения — т. е. степени смещения воспринимаемого положения своей руки в пространстве в сторону искусственной конечности.
На современном этапе исследований получают все большее распространение эксперименты в виртуальной реальности (ВР). Первые исследования в данной области показали, что люди могут воспринимать манекена в качестве собственного тела, если смотрят на него через шлем ВР, подключенный к видеокамере [Lenggenhager, 2007], или же испытывать опыт нахождения «вне» своего реального тела [Ehrsson, 2007]. Первые попытки моделирования ИРР в ВР были предприняты Слэйтером с коллегами [Slater, 2008]. В статье описан вариант так называемой иллюзии виртуальной руки (ИВР). Испытуемый наблюдал за стимуляцией, прикладываемой с помощью сферического объекта к его реальной руке и трехмерной виртуальной конечности аватара. Было показано, что синхронная зрительно-тактильная стимуляция скрытой реальной и видимой виртуальной руки приводит к формированию иллюзии так же, как и в эксперименте с резиновым протезом: возникает чувство обладания виртуальной конечностью, и степень проприоцептивного смещения в ее сторону является существенно более высокой, чем в асинхронном (контрольном) условии [Slater, 2009; Slater, 2008]. Полученные результаты демонстрируют, что ИРР может быть воссоздана в ВР и вызывать у испытуемого ощущения, сравнимые с классической иллюзией [Botvinick, 1998].
Задача подробного изучения описываемой иллюзии является достаточно актуальной в связи с возможностью применения результатов исследований в игровой индустрии, спортивной психологии, медицине, психотерапии [Краснова-Гольева, 2015; Нестик, 2017; Liebert, 2005]. Изучение основных закономерностей соматоперцепции и формирования образа тела также вносит существенный вклад в понимание причин и путей коррекции патологических состояний, связанных с нарушенным восприятием собственного тела у пациентов, страдающих неврологическими и психическими заболеваниями [Boesch, 2016; Moseley, 2012; Preston, 2018]. Широкое внедрение технологий ВР обусловлено тем, что они позволяют в контролируемых условиях моделировать сложные ситуации, которые невозможно воссоздать в обычной объективной реальности. Преимущество ВР заключается в обесценении высокого уровня контроля и управления переменными, в обеспечении экологической валидности результатов и в возможности точного воспроизведения условий эксперимента [Loomis, 1999].
На основании проанализированных выше работ можно сделать вывод о возможности и целесообразности переноса классической ИРР в условия ВР, близости получаемого в иллюзиях феноменологического опыта и потому правомерности сравнения двух вариантов иллюзии. Тем не менее, сравнительных исследований формирования иллюзий в ВР и в обычных условиях представлено крайне мало. Одной из таких работ является исследование по сопоставлению ИРР в обычной, виртуальной и смешанной реальности [IJsselsteijn, 2006], однако испытуемым предъявлялось плоское изображение руки, спроецированное на стол. В результате авторы пришли к выводу, что объемность виртуальной руки является важным фактором формирования иллюзии.
Таким образом, цель настоящего исследования состояла в разработке экспериментальной модели иллюзии резиновой руки в виртуальной среде и оценке эквивалентности иллюзии виртуальной руки своему прототипу — иллюзии обладания резиновой рукой. Гипотезой выступило предположение об эквивалентности ИРР и ИВР, формирующихся при помощи зрительно-тактильной интеграции.
Программа исследования
Характеристика испытуемых. В исследовании приняли участие 16 девушек (возраст 21,56 ± 1,46 лет, от 18 до 25 лет; правши; без диагностированных психических и неврологических заболеваний). Испытуемые были проинформированы об условиях эксперимента и подписали согласие на участие.
Процедура проведения. Каждая проба включала в себя 2 этапа: синхронной и асинхронной зрительно-тактильной стимуляции — а именно прикосновений кисточкой к реальной руке и наблюдения прикосновений к резиновой/виртуальной руке. Каждый этап длился 240 секунд. Был выбран такой промежуток непрерывной стимуляции, чтобы иллюзия точно успела возникнуть (есть данные о разбросе времени возникновения от 5 до 116 секунд [Slater, 2009]) и при этом не наступили усталость и привыкание. Между синхронным и асинхронным условием в рамках одной иллюзии был 2—3-минутный перерыв. Этапы ИРР и ИВР разделялись 5—7-минутным перерывом для отдыха.
ИРР — иллюзия резиновой руки. Для проведения использовались две художественные кисти, резиновый макет руки и специальная коробка (рис. 1). Все испытуемые сидели неподвижно за столом. Правая рука помещалась в закрытую часть коробки справа, так что испытуемый не мог ее видеть, а левая лежала на коленях. Резиновая рука лежала на виду у испытуемого, на расстоянии 15 см от реальной. На испытуемого была наброшена черная ткань, накрывающая резиновую конечность по предплечье.
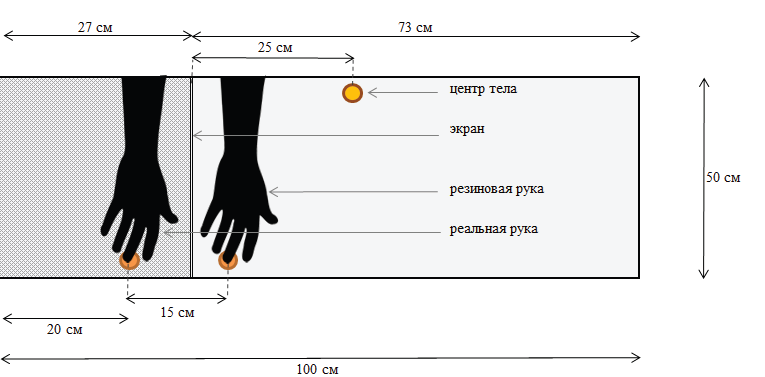
Рис. 1. Схема коробки для эксперимента с ИРР
Этап синхронной стимуляции представлял собой синхронные прикосновения двумя кисточками к спрятанной за перегородкой реальной и находящейся перед испытуемым искусственной рукам (частота около 0,5 Гц, длительность прикосновений — 1 с., между ними — 0,5—1,5 с.). Стимуляция осуществлялась по отношению к четырем пальцам (по очереди, исключая большой). Испытуемый должен был внимательно наблюдать за кончиком кисти, не отвлекаясь и не двигаясь. Далее следовало измерение воспринимаемого положения реальной правой руки — проприоцептивного смещения — и заполнение опросника обладания резиновой рукой (см. подраздел «Методики»). Этап асинхронной стимуляции проходил аналогичным образом с одним лишь исключением, что прикосновения кисточкой к одноименным пальцам реальной и резиновой руки осуществлялись не одновременно, а последовательно. При этом частота около 0,5 Гц сохранялась.
ИВР — иллюзия виртуальной руки. Для проведения этапа в ВР использовались: деревянная конструкция с измерительной лентой (рис. 2А); широкая художественная кисты установленная на двигающейся конструкции на штативе (рис. 2Б); латник движений Microsoft Kinect 1.0. Стимуляция осуществлялась по дуговым траекториям за счет поворота держателей между крайними положениями (120 градусов). Время перемещения (скорость) и задержки между циклами вращения контролировались с помощью платы Arduino nano, принимающей команды через COM-порт. Испытуемый сидел неподвижно. Правая рука лежала на столе (в позе, соответствующей положению виртуальной руки), а левая — на коленях. Hit испытуемом был надет шлем Oculus Rift CV1, в котором он видел изображение комнаты и аватара человека за столом из позиции от первого лица (рис. 2В). Сцена была запрограммирована из стандартных библиотек Unity 5.3.5. До начала стимуляции испытуемый мог рассмотреть корпус аватара и окружение. Затем на столе, на месте реальной правой руки, появлялась виртуальная рука (аналогично ИРР она была смещена ближе к центру тела на 15 см). Над ней двигалась реалистичная виртуальная кисточка — синхронно или асинхронно с настоящей кисточкой, касающейся реальной конечности (рис. 2Г).
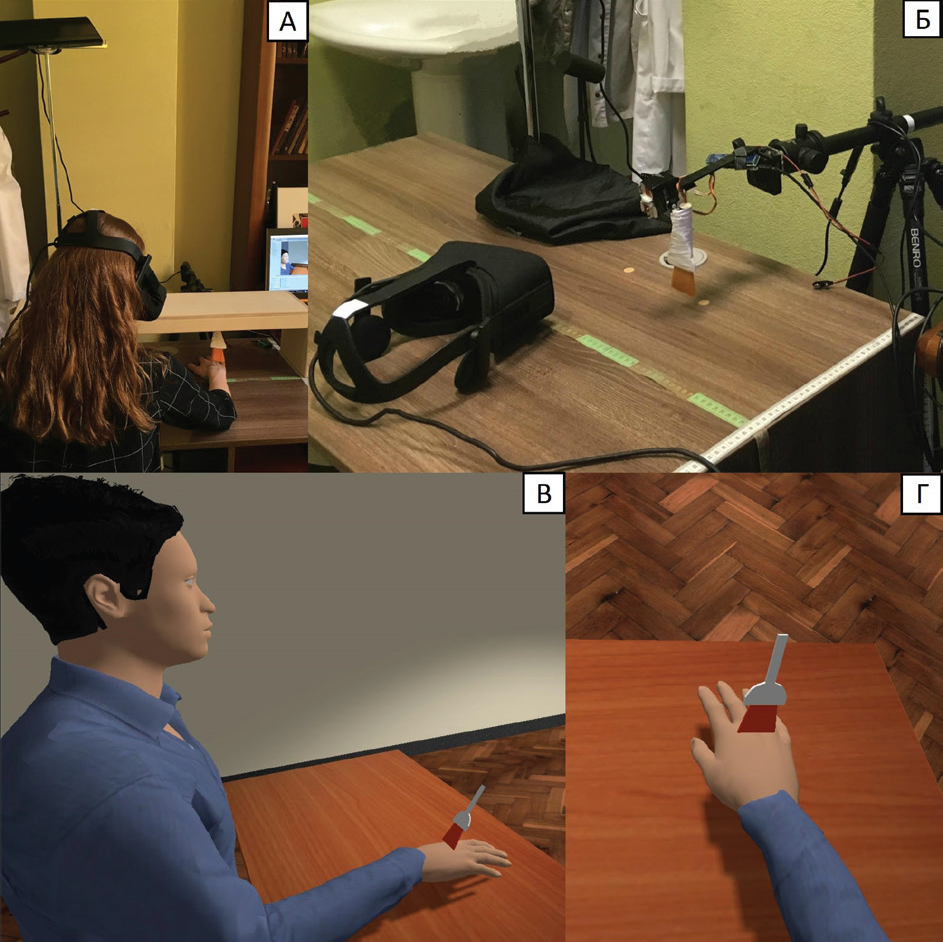
Рис. 2. А, Б — проведение эксперимента с ИВР; В, Г — сцена в ВР
Этап синхронной стимуляции представлял собой синхронные прикосновения двумя кисточками к реальной и виртуальной рукам (частота около 0,5 Гц, длительность прикосновений — около 1 с., между ними — 0,5—1,5 с. Виртуальная кисточка была нарисована по подобию реальной. Кисточки размещались так, что прикосновения приходились на верхние фаланги трех пальцев одновременно: указательного, среднего и безымянного. Испытуемый должен был наблюдать в шлеме за движущейся кисточкой и виртуальной рукой. В наушниках предъявлялся белый шум. Далее осуществлялось измерение воспринимаемого положения реальной правой руки — проприоцептивного смещения — и заполнение опросника обладания виртуальной рукой. На время измерения смещения испытуемый закрывал глаза и ориентировался только на проприоцептивные ощущения. Этап асинхронной стимуляции проходил аналогичным образом с одним лишь исключением, что кисточки касались пальцев реальной и виртуальной руки не одновременно, а последовательно. При этом частота около 0,5 Гц сохранялась.
Таким образом, в эксперименте варьировались две независимые переменные, т. е. порядок их предъявления: 1) тип иллюзии — ИРР или ИВР; 2) синхронная или асинхронная стимуляция (экспериментальное и контрольное условие). Всего получилось 8 проб- вариантов комбинации условий (полное позиционное уравнивание), в каждом участвовало двое испытуемых.
Методики
Измерение проприоцептивного смещения. Данный показатель отражает степень смещения воспринимаемого положения собственной руки испытуемого в сторону искусственной и свидетельствует о перестройке проприоцептивной схемы вследствие воздействия иллюзии. В обеих пробах экспериментатор ставил указательный палец левой руки испытуемого на край коробки, на котором была закреплена измерительная лента с отмеченными на ней тремя точками: 15 (1), 30 (2) и 40 (3) см. Задачей было одним движением провести из точки до среднего пальца своей правой руки (в реальности он находился на уровне 20 см) по краю коробки, опираясь на кинестетические ощущения, без участия зрения. При этом правая рука оставалась неподвижной. В ИВР испытуемый также на это время закрывал глаза и потому не видел изображения в шлеме. Порядок начальных точек 1, 2 и 3 был случайным. Измерение проводилось 9 раз: до и после периода стимуляции в ИРР (в синхронном и асинхронном условии), аналогично в ИВР, а также в качестве тренировки до начала первого эксперимента. Тренировка проходила в среде ИРР или ИВР — в зависимости от того, какая иллюзия следовала первой.
Опросник обладания искусственной конечностью. После каждого периода стимуляции испытуемым предлагался опросник обладания резиновой/виртуальной рукой, который состоял из 4 тестовых утверждений, связанных с основными перцептивными эффектами иллюзии, и 4 контрольных — для учета уровня внушаемости и социальной желательности (рис. 3). Утверждения были представлены в печатном виде на листе. Испытуемым было необходимо отметить свой ответ вертикальной чертой на визуальной аналоговой шкале — горизонтальной линии длиной 100 мм, где полюс 0 соответствовал ответу «Полностью не согласен», а 100 — «Полностью согласен»; середина обозначала ответ «Нейтрально — ни да ни нет». Баллы суммировались отдельно по тестовым и контрольным утверждениям после каждого из 4 периодов стимуляции. Итоговый балл свидетельствует о степени восприятия искусственной руки как своей собственной.
Опросник обладания искусственной конечностью
|
Категория |
Утверждения |
|
Тестовые утверждения |
Т1. Мне казалось, что я ощущал прикосновения к резиновой руке. Т2. Мне казалось, что резиновая рука является частью моего тела. ТЗ. Казалось, что прикосновения ко мне были вызваны кистью, касающейся резиновой руки. Т4. Мне казалось, что я ощущал руку именно в том месте, где находилась резиновая конечность. |
|
Контрольные утверждения |
С1. Мне казалось, будто у меня три руки. С2. Мне казалось, что моя рука становилась резиновой. СЗ. Мне казалось, что резиновая рука двигалась к моей руке. С4. Мне казалось, будто у меня больше не было рук, что они исчезли. |
Рис. 3. Утверждения опросника обладания резиновой рукой
Результаты
Статистический анализ проводился с помощью R 3.4.2 (R Studio Version 1.1.383). Проверялись гипотеза о различиях и гипотеза об эквивалентности двух вариантов иллюзии.
Проприоцептивное смещение (proprioceptive drift).
Было усреднено значение ответов по трем точкам (15, 30 и 40 см — изначальное положение пальца при измерении смещения), затем посчитана разница между условием «до» и условием «после» экспериментального воздействия. В итоге было получено значение сдвига (проприоцептивного смещения) для каждого из условий — синхронного и асинхронного — в рамках иллюзий виртуальной и резиновой руки. Результаты представлены на рис. 4.
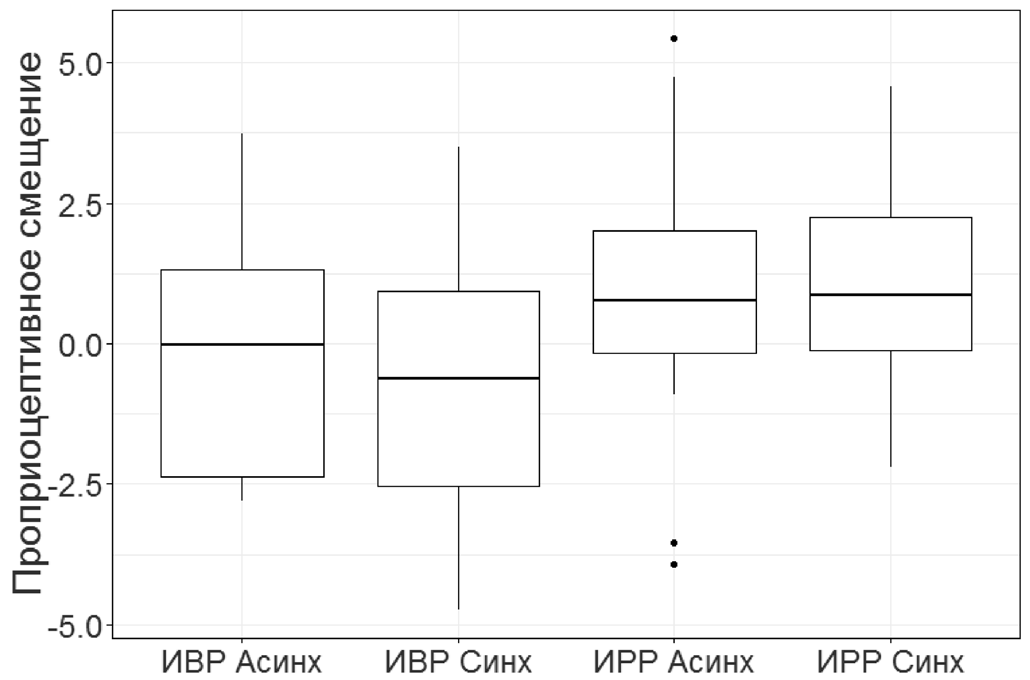
Рис. 4. Значения проприоцептивного смещения, полученные в 4 экспериментальных условиях (в сантиметрах). На диаграмме линиями отмечены медианы проприоцептивного смещения при асинхронном (Асинх) и синхронном (Синх) условиях иллюзии виртуальной (ИВР) и резиновой (ИРР) руки, а прямоугольные области вокруг обозначают доверительные интервалы; точками отмечены выбросы
В ИВР средняя величина смещения оказалась близкой к нулю: -0,07±2,3 см в асинхронном, -0,66±2,4 см в синхронном условии. В это же время в ИРР смещение составило: 0,85±2,6 см в асинхронном и 0,86±1,8 см в синхронном условии.
Затем была построена смешанная модель линейной регрессии со сдвигом в качестве зависимой переменной и типом условия (синхронное/асинхронное), типом иллюзии (ИРР/ИВР) в качестве независимых переменных как факторов, оказывающих влияние на возникновение иллюзии: drift~Condition*Illusion+(1|Subject_code).
Анализ ANOVA 2-го типа выявил, что тип условия и взаимодействие факторов оказались незначимыми. Значимым фактором является только «тип иллюзии»: в ИРР смещение выше, чем в ИВР (p<0,05). Анализ моделей, построенных отдельно для каждой из иллюзий (drift~Condition+(1|Subject_code)), выявил, что фактор «тип условия» также не оказывает значительного влияния на возникновение иллюзии.
Оценка эквивалентности двух иллюзий (ИРР и ИВР). В тесте на эквивалентность (equivalence test) нулевая гипотеза, в отличие от гипотезы о различиях, состоит в том, что факторы (явления, выборки) должны различаться в определенной степени. Для оценки биоэквивалентности (аналог нашей задачи) принято вычислять 90%-ные доверительные интервалы и проверять, находятся ли они внутри выбранных пределов эквивалентности, что соответствует проверке двух односторонних тестов на уровне значимости 5% [Бондарева, 2004; Statistical Approaches to, 2017]. Степень эквивалентности иллюзий определялась путем вычисления средних арифметических. Из предыдущих исследований [Perepelkina, 2017] были взяты данные о стандартном отклонении проприоцептивного сдвига для синхронного (SDS=3,6) и асинхронного (SDA=2,8) условий. На основе них была вычислена оценка стандартного отклонения разности сдвига для синхронного и для асинхронного условий: SDsa=x/(SDsa2+SDaa2)=4,56.
Доверительный интервал для взаимодействия факторов модели (контраст контрастов) для текущего исследования — drift_log~Condition*Illusion+(1|Subject_code). В результате вычислений было получено, что в нашем исследовании 90%-й доверительный интервал для среднего арифметического эффекта (-1,24; 2,43) находится в пределах одного стандартного отклонения, оцененного на основе данных из предыдущих работ как (-4,56; 4,56). Таким образом, был сделан вывод об эквивалентности двух иллюзий по показателю проприоцептивного смещения.
Степень выраженности чувства обладания искусственной конечностью (ownership).
График на рис. 5 демонстрирует медианы и доверительные интервалы, полученные по показателям выполнения тестовых утверждений опросника обладания искусственной конечностью. Результаты представлены в миллиметрах, так как для ответа испытуемые отмечали степень своего согласия с утверждением в виде отрезка на континуальной шкале (максимальный балл по 4 утверждениям — 400 мм). Средний балл по опроснику в целом (сумма баллов по 4 тестовым и 4 контрольным утверждениям, максимальное значение — 800 мм на визуальной шкале) для ИРР составил 72±77 мм в асинхронном и 148±115 мм в синхронном условии. Для ИВР балльное значение меньше: 57±54 мм в асинхронном и 119±112 мм в синхронном условии.
Для оценки влияния изучаемых факторов на формирование чувства обладания искусственной рукой была построена смешанная линейная модель.В качестве зависимой переменной была выбрана сумма баллов по всем утверждениям опросника, в качестве независимых переменных были выбраны тип условия (синхронное/асинхронное), тип утверждений (тестовые/контрольные) и тип иллюзии (ИРР/ИВР): Ownership~Condition*Test_Contr*Illusion+(1|Subject_code).
ANOVA выявил, что значимыми являются факторы типа иллюзии (р<0,01), типа утверждений (p<0,001) и типа условия (p<0,001), а также взаимодействие факторов типа условия и типа утверждений (p<0,001). Результаты проведенного анализа свидетельствуют о следующих различиях: а) степень выраженности чувства обладания была более высокой в ИРР по сравнению с ИВР; б) сумма баллов по тестовым утверждениям опросника была больше, чем по контрольным утверждениям; в) степень выраженности чувства обладания искусственной рукой была выше в ситуации синхронной стимуляции, нежели в асинхронной. Причем в зависимости от условия сумма баллов по тестовым утверждениям либо значимо отличалась от суммы баллов по контрольным утверждениям, либо не различалась, как в ситуации асинхронной стимуляции. Анализ отдельных моделей для каждой из иллюзий также выявил, что значимыми факторами формирования иллюзии обладания искусственной рукой являются факторы типа условия и типа утверждений, а также их взаимодействие (p<0,001). Анализ модели только для тестовых утверждений, отражающих субъективный опыт иллюзии, также показал, что тип иллюзии (p<0,01) и тип условия (p<0,001) являются важными факторами, оказывающими существенное влияние на формирование иллюзии: степень выраженности чувства обладания в ИРР выше, чем в ИВР, и в синхронном условии выше, чем в асинхронном.
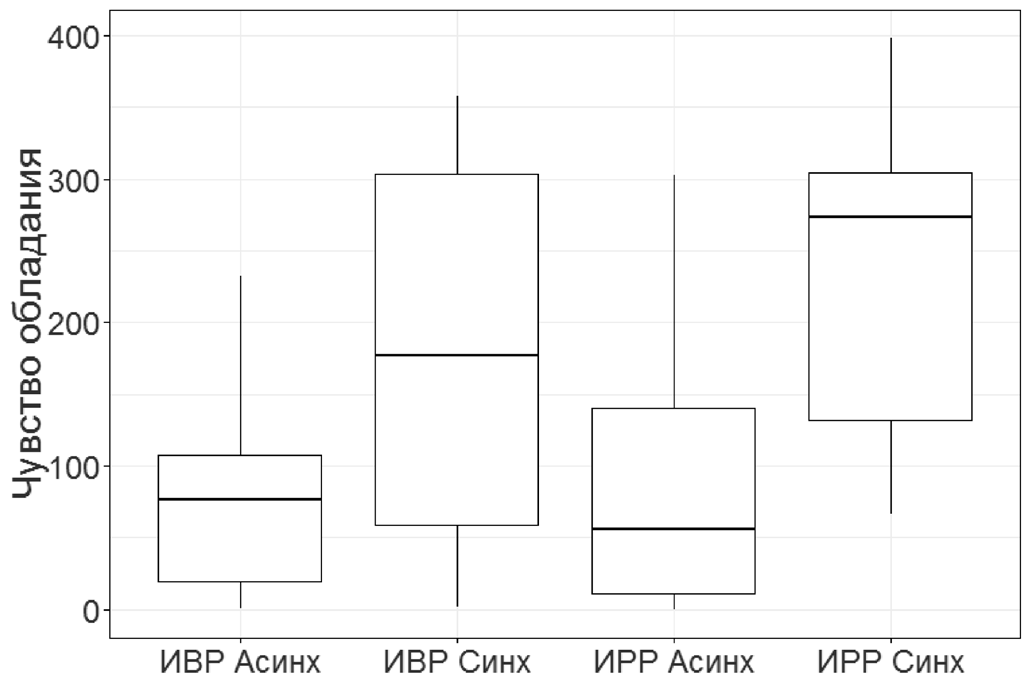
Рис. 5. Результаты, полученные по тестовым утверждениям опросника обладания искусственной конечностью в 4 экспериментальных условиях (в миллиметрах). На диаграмме линиями отмечены медианы значений степени выраженности чувства обладания при асинхронном (Асинх) и синхронном (Синх) условиях иллюзии виртуальной (ИВР) и резиновой (ИРР) руки, а прямоугольные области вокруг обозначают доверительные интервалы
Оценка эквивалентности ИРР и ИВР. Эквивалентность определялась путем вычисления средних арифметических. Расчеты велись для суммы баллов только по тестовым утверждениям. Из предыдущих исследований [Perepelkina, 2017] были взяты данные о стандартном отклонении суммы тестовых утверждений для синхронного (SDS=5,3) и асинхронного (SDa=4,6) условий. На их основе была вычислена оценка стандартного отклонения разности между суммой баллов по тестовым утверждениям при синхронном и асинхронном условиях: SDsa=x/(SDsa2+SD/2)=5,99.
Так как в предыдущем исследовании использовалась 7-балльная шкала Ликерта, а в настоящем — 100-балльная континуальная шкала, оцененное стандартное отклонение перевели в масштаб 100-балльного опросника: SDSAm=^(SDSAA2*(100/7) л2)=85,63.
И тогда доверительный интервал для оценки взаимосвязи факторов модели (контраст контрастов) для текущего исследования —Ownership(test)~Condition*Illusion+(1|Su bject_code). Было получено, что 90%-й доверительный интервал для среднего арифметического значения степени выраженности эффекта (-26,25; 75,87) лежит в пределах одного стандартного отклонения, оцененного на основе данных из предыдущих исследований как (-85,63; 85,63). Таким образом, можно сделать вывод об эквивалентности двух типов иллюзии по интенсивности чувства обладания искусственной конечностью.
Обсуждение результатов
По аналогии с исследованиями биоэквивалентности была протестирована эквивалентность модели ИВР и классической ИРР. В итоге был сделан вывод об эквивалентности двух видов иллюзии. Одновременно с этим были получены значимые различия между ИРР и ИВР по показателю проприоцептивного смещения и по степени выраженности возникшего чувства обладания резиновой/виртуальной рукой. Согласно критериям биоэквивалентности [Regulation of biological, 2012], в случае наличия значимых различий между переменными может приниматься гипотеза об их эквивалентности, если различия входят в допустимые пределы эквивалентности (которые определяются на основании прошлого опыта исследований, общих теоретических и практических соображений), как было в нашем случае. Таким образом, основная гипотеза исследования подтвердилась.
Результаты анализа свидетельствуют о различиях в показателях степени выраженности чувства обладания искусственной конечностью, как для тестовых и контрольных утверждений опросника, так и для синхронного и асинхронного условий, и в случае формирования иллюзий резиновой и виртуальной руки. Кроме того, если в случае синхронной стимуляции были обнаружены существенные различия в сумме баллов по тестовым и контрольным вопросам, то при асинхронной стимуляции таких различий обнаружено не было. При оценке особенностей формирования каждой из иллюзий по отдельности были получены аналогичные результаты. Что касается оценки только тестовых утверждений (отражающих субъективный опыт иллюзии), то сумма баллов по ним значимо различалась в синхронном и асинхронном условиях, а также в двух вариантах иллюзии (обладание выше в ИРР). Таким образом, на формирование чувства обладания существенное влияние оказывает фактор конгруэнтности поступающих сенсорных сигналов во времени [Botvinick, 1998; Sanchez-Vives, 2010]. Выявленная статистически значимая разница в ответах на тестовые и контрольные вопросы согласуется с данными большинства предыдущих работ и подтверждает специфику субъективного опыта, получаемого при формировании данных иллюзий.
При оценке специфики формирования обеих иллюзий значимых различий в величине проприоцептивного смещения между синхронным и асинхронным условием обнаружено не было, т. е. классический результат не подтвердился. Как правило, говорят о том, что именно синхронная стимуляция вызывает возникновение иллюзии [Ehrsson, 2012; Ehrsson, 2007; Sanchez-Vives, 2010]. С другой стороны, имеются данные и в пользу того, что даже при асинхронной стимуляции субъект может испытывать иллюзию обладания искусственной конечностью или телом [Maselli, 2013; Rohde, 2011; Slater, 2010]. Среди факторов, которые могут способствовать возникновению иллюзии, называют двигательную активность, реалистичную текстуру кожи и одежды. В эксперименте Родэ [Rohde, 2011] смещение наблюдалось не только в синхронном, но и в асинхронном условии и даже без тактильной стимуляции резиновой руки. Вероятно, для возникновения чувства обладания мультисенсорная интеграция, которая создается синхронизированностью зрительно-тактильной стимуляции, является критически важной, в то время как перестройка проприоцептивной схемы не так зависит от синхронности поступления сигналов. Следовательно, за двумя параметрами формирования иллюзии стоят различные механизмы. Полученный нами результат подтверждает эти данные [Rohde, 2011]. Впрочем, в случае с ИВР данный вывод вряд ли согласуется с результатами вышеупомянутых исследований, так как проприоцептивное смещение в сторону виртуальной руки не возникло ни в одном из условий. Это может быть объяснено, например, большим размером выборки, индивидуальными особенностями восприятия участников эксперимента. По малоисследованной на данный момент причине около 30% популяции остаются устойчивыми к иллюзии [Lin, 2016; Lloyd, 2007]. Различия в подверженности формированию той или иной иллюзии могут быть обусловлены прошлым опытом восприятия (к примеру, родом занятий), тем, какое место в интеграционном процессе мозг отводит каждому виду информации: зрению, осязанию, проприоцепции и т. д. [Jola, 2011]. Одним из путей улучшения дизайна исследования в будущем может быть увеличение размера выборки или добавление двигательной активности (существуют данные о том, что движения усиливают иллюзию [Ma]).
Величина проприоцептивного сдвига в варианте восприятия резиновой руки была значимо выше, чем в ситуации иллюзии виртуальной руки. В ИВР смещение оказалось близким к нулю. Показатели степени выраженности чувства обладания в ИРР также превосходили соответствующие показатели в ситуации ИВР. В аналогичной работе по сравнительному исследованию специфики восприятия тела в виртуальной и обыычной реальности было похожим образом обнаружено, что смещение и чувство обладания в ВР меньше, нем при обычном варианте со зрительно-тактильной стимуляцией [IJsselsteijn, 2006]. Авторы делают вывод, что недостаточно только синхронной во времени стимуляции, как ранее утверждали Армел и Рамачандран [Armel, 2003]; немаловажную роль играет также правдоподобие и внешнее сходство искусственного объекта (нисходящие top-down механизмы), в частности, значимым фактором является объемность изображения (3D форма). Тогда результаты проведенного нами исследования могут объясняться следующим образом: во-первых, несовершенством компьютерной графики или недостаточным внешним соответствием виртуальной и реальной конечностей, по сравнению с очень реалистичным макетом искусственной руки в ИРР [о важности антропоморфного внешнего вида см.: 32]; впрочем, существуют данные и в пользу того, что антропоморфность, внешнее сходство и высокое качество изображения в ВР не являются обязательным условием возникновения ИВР [Lugrin, 2015]; во-вторых, могли сказаться расхождения в прикосновениях двух кисточек в ИВР (из-за несколько разной высоты рук испытуемых и потому различной силы и длительности касания кисточкой), на которые обращали внимание некоторые участники. Например, в статье Слэйтера [Slater, 2008] описано, что на этапе пилотных исследований варианты экспериментальных условий, при которых не было обнаружено возникновения иллюзии, были отброшены, и одной из причин была недостаточная пространственная конгруэнтность прикосновений: в случае, если шарик не касался поверхности виртуальной руки в том же месте, a погружался в нее, происходило разрушение (неформирование) иллюзии. Известно, что синхронность имеет принципиальное значение для формирования чувства обладания искусственной конечностью [Rohde, 2011]. Маселли и Слэйтер отмечали, что в случае недостаточно высокого уровня реалистичности виртуального тела именно конгруэнтность мультисенсорных сигналов становится решающим фактором формирования иллюзии обладания искусственной конечностью [Maselli, 2013].
Выводы
Исследование факторов формирования иллюзии обладания искусственной конечностью проводилось с использованием технологий виртуальной реальности, что позволило сравнить два варианта иллюзии: в классическом варианте иллюзии резиновой руки и в ситуации виртуальной реальности. Сравнение проводилось в контексте гипотез о различиях и об эквивалентности (по аналогии с биоэквивалентностью). Поскольку в ходе анализа подтвердилась эквивалентность иллюзий резиновой и виртуальной руки по проприоцептивному смещению и чувству обладания искусственной конечностью, то можно считать задачу разработки эквивалентной экспериментальной модели выполненной.
В то же время обнаружились различия в особенностях их формирования, а именно по параметрам проприоцептивного смещения и степени выраженности чувства обладания, но эти различия вошли в интервал допустимых различий. Не было обнаружено существенных различий в величине проприоцептивного смещения при синхронной и асинхронной стимуляции.